Transferir como PDF, PPTX

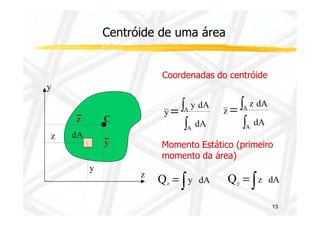
![Centróide de uma área
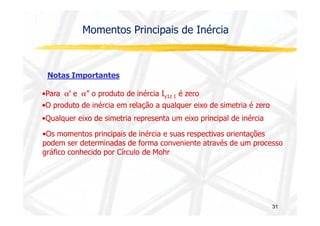
Notas Importantes
•Eixos centrais - Eixos que passam pelo centróide da seção
•Dimensão do Momento Estático ⇒ [L]3
•Sinal do Momento Estático ⇒ Positivo, Negativo ou Nulo
14
•O Momento Estático relativo ao eixo central é nulo
Seções com Simetria
C C
Dupla
C
y C
z
Simples
C
Em relação a um
ponto](https://image.slidesharecdn.com/aula132-141210102115-conversion-gate02/85/Resistencia-dos-Materiais-II-14-320.jpg)
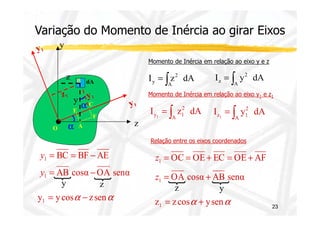
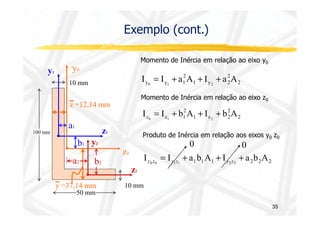
![Momento de Inércia da Seção
Momento de Inércia em relação ao eixo y e z
y = ∫ I y dA
I z dA
A
2
A
2
z = ∫
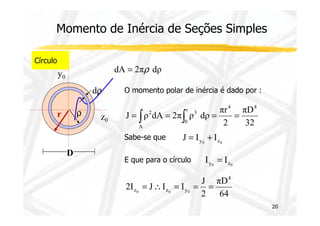
Momento de Polar de Inércia
J ρ dA
2 = ∫
A
y
z C
15
z
y
z dA
y
r
Sabemos porém que: r2 = y2 + z2
2 = ∫ +
J (y z2 ) dA
A
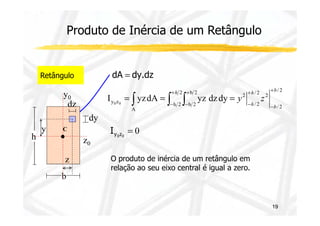
Produto de Inércia (Momento de Inércia
Misto)
Notas :
I yz dA
yz ∫A =
Dimensão - [L]4
Iy , Iz e J sempre positivos - Iyz positivo, negativo ou nulo](https://image.slidesharecdn.com/aula132-141210102115-conversion-gate02/85/Resistencia-dos-Materiais-II-15-320.jpg)

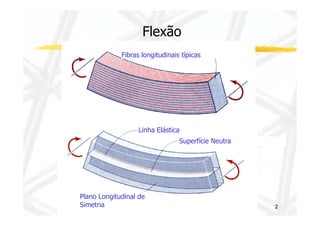
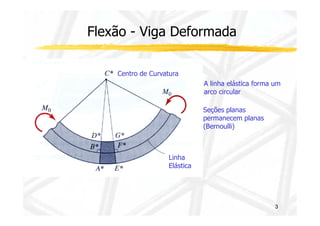
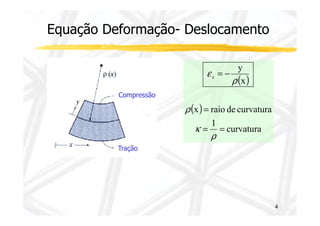
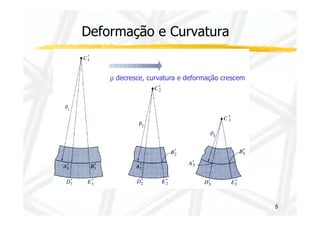
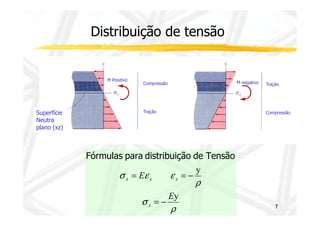
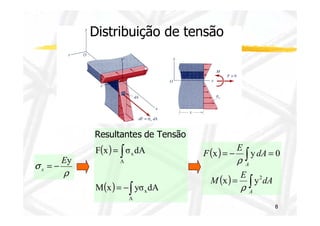
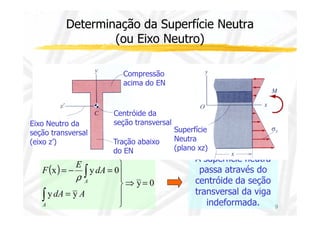
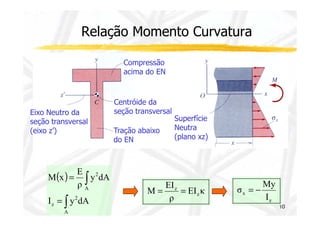
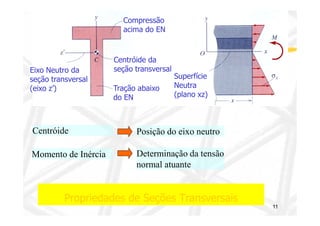
O documento discute conceitos de resistência dos materiais relacionados à flexão de vigas. As principais ideias apresentadas são: 1) a distribuição de tensões e deformações em uma viga sob flexão, com tração em uma face e compressão na outra; 2) o conceito de superfície neutra e como ele é relacionado ao centróide da seção transversal original; 3) como propriedades geométricas da seção transversal, como momento de inércia, influenciam a relação entre momento de flexão e curvatura.























































































