Introdução
• Nem sempreé possível tratar um corpo como uma única partícula. Em geral, o tamanho do corpo e os
pontos de aplicação específicos de cada uma das forças que nele actuam devem ser considerados.
• Supõe-se que a maioria dos corpos considerados em mecânica elementar são rígidos, isto é, as deformações
reais são pequenas e não afetam as condições de equilíbrio ou de movimento do corpo.
• Iremos descrever o efeito de forças exercidas num corpo rígido e como substituir um dado sistema de forças
por um sistema equivalente mais simples. Para tanto, são importantes os seguintes conceitos:
• momento de uma força em relação a um ponto
• momento de uma força em relação a um eixo
• momento devido a um binário
• Qualquer sistema de forças atuando em um corpo rígido pode ser substituído por um sistema equivalente
composto por uma única força atuando em um dado ponto e um binário.
3.
Forças Externas eForças Internas
• Forças atuando em corpos rígidos
são divididas em dois grupos:
- Forças Externas
- Forças Internas
• Forças externas são mostradas em um
diagrama de corpo livre.
• Se não for contrabalanceada, cada uma das forças externas pode imprimir ao corpo
rígido um movimento de translação ou de rotação, ou ambos.
4.
Princípio da Transmissibilidade:Forças
Equivalentes
• Princípio da Transmissibilidade -
As condições de equilíbrio ou de movimento de um
corpo não se modificam ao se transmitir a acção de
uma força ao longo de sua linha de acção.
Na figura ao lado F e F’ são forças equivalentes.
• Para o camião ao lado, o facto de mudar o
ponto de aplicação da força F para o pára-
choque traseiro não altera o seu movimento
e nem interfere nas acções das demais
forças que nele actuam.
• O princípio da transmissibilidade nem
sempre pode ser aplicado na determinação
de forças internas e deformações.
5.
Produto Vetorial deDois Vetores
• O conceito de momento de uma força em relação a um ponto é mais fácilmente
entendido por meio das aplicações do produto vetorial.
• O produto vetorial de dois vetores P e Q é definido como o
vetor V que satisfaz às seguintes condições:
1. A linha de ação de V é perpendicular ao plano que
contém P e Q.
2. A intensidade de V é
3. A direção e o sentido de V são obtidos pela regra da mão
direita.
sen
Q
P
V
• Produtos vetoriais:
- não são comutativos,
- são distributivos,
- não são associativos,
Q
P
P
Q
2
1
2
1 Q
P
Q
P
Q
Q
P
S
Q
P
S
Q
P
6.
Produtos Vetoriais: ComponentesRetangulares
• Produtos vetoriais de vetores unitários:
0
0
0
k
k
i
k
j
j
k
i
i
j
k
j
j
k
j
i
j
i
k
k
i
j
i
i
• Produto vetorial em termos de
componentes retangulares:
k
Q
j
Q
i
Q
k
P
j
P
i
P
V z
y
x
z
y
x
k
Q
P
Q
P
j
Q
P
Q
P
i
Q
P
Q
P
x
y
y
x
z
x
x
z
y
z
z
y
z
y
x
z
y
x
Q
Q
Q
P
P
P
k
j
i
V
7.
Momento de umaForça em Relação a um Ponto
• Uma força é representada por um vetor que define sua
intensidade, sua direção e seu sentido. O seu efeito num
corpo rígido depende também do seu ponto de aplicação.
• O momento de uma força F em relação a um ponto
O é definido como
F
r
MO
• O vetor momento MO é perpendicular ao plano que
contém o ponto O e a força F.
• Qualquer força F’ que tem a mesma intensidade, direção e
sentido de F, é equivalente a ela se também tem sua mesma
linha de ação e portando, gera o mesmo momento.
• A intensidade de MO expressa a tendência da força de
causar rotação em torno de um eixo dirigido ao longo
de MO.
O sentido do momento pode ser determinado pela regra
da mão direita.
Fd
rF
MO
sen
8.
Momento de umaForça em Relação a um
Ponto
• Estruturas bidimensionais têm comprimento e largura,
mas profundidade desprezível e estão sujeitas a forças
contidas no plano da estrutura.
• O plano da estrutura contém o ponto O e a força F. MO,
o momento da força em relação a O, é perpendicular ao
plano.
• Se a força tende a girar a estrutura no sentido anti-
horário, o vetor momento aponta para fora do plano da
estrutura e a intensidade do momento é positiva.
• Se a força tende a girar a estrutura no sentido horário, o
vetor momento aponta para dentro do plano da estrutura e
a intensidade do momento é negativa.
9.
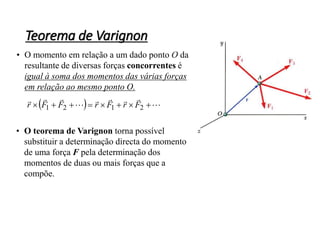
Teorema de Varignon
•O momento em relação a um dado ponto O da
resultante de diversas forças concorrentes é
igual à soma dos momentos das várias forças
em relação ao mesmo ponto O.
• O teorema de Varignon torna possível
substituir a determinação directa do momento
de uma força F pela determinação dos
momentos de duas ou mais forças que a
compõe.
2
1
2
1 F
r
F
r
F
F
r
10.
Componentes Retangulares doMomento de uma Força
k
yF
xF
j
xF
zF
i
zF
yF
F
F
F
z
y
x
k
j
i
k
M
j
M
i
M
M
x
y
z
x
y
z
z
y
x
z
y
x
O
O momento de F em relação a O,
k
F
j
F
i
F
F
k
z
j
y
i
x
r
F
r
M
z
y
x
O
,
11.
Componentes Retangulares doMomento de uma Força
Momento de F em relação a B:
F
r
M B
A
B
/
k
F
j
F
i
F
F
k
z
z
j
y
y
i
x
x
r
r
r
z
y
x
B
A
B
A
B
A
B
A
B
A
/
z
y
x
B
A
B
A
B
A
B
F
F
F
z
z
y
y
x
x
k
j
i
M
12.
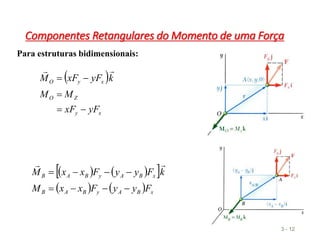
Componentes Retangulares doMomento de uma Força
3 - 12
Para estruturas bidimensionais:
x
y
Z
O
x
y
O
yF
xF
M
M
k
yF
xF
M
x
B
A
y
B
A
B
x
B
A
y
B
A
B
F
y
y
F
x
x
M
k
F
y
y
F
x
x
M
13.
Exercicio de Aplicação
Umaforça vertical de 450 N é aplicada na
extremidade de uma alavanca que está ligada
ao eixo em O.
Determine:
a) o momento da força em relação a O;
b) a força horizontal aplicada em A que gera o
mesmo momento;
c) a força mínima aplicada em A que gera o
mesmo momento;
d) a posição de uma força vertical de 1.080 N para
que ela gere o mesmo momento;
e) se alguma das forças obtidas nas alineas b, c e d
é equivalente à força original
14.
a) O momentoem relação a O é igual ao produto da
força pela distância perpendicular entre a linha de
ação da força e O. Como a força tende a girar a
alavanca no sentido horário, o vetor momento
aponta para dentro do plano que contém a
alavanca e a força.
m
0,3
N
450
cm
30
60
cos
cm
60
O
O
M
d
Fd
M
m
N
135
O
M
15.
b) Para aforça horizontal aplicada em A que gera o
mesmo momento tem-se,
m
52
,
0
m
N
35
1
m
0,52
m
N
135
cm
52
60
sen
cm
60
F
F
Fd
M
d
O
N
6
,
259
F
16.
c) A forçamínima aplicada em A que gera o mesmo
momento deve atuar a uma distância perpendicular
é máxima de O, ou seja, quando F é perpendicular a
OA.
m
,6
0
m
N
135
m.
,6
0
m
N
35
1
F
F
Fd
MO
N
225
F
17.
d) Para determinaro ponto de aplicação de uma
força vertical de 1.080 N que gera o mesmo
momento em relação a O temos,
cm
12,5
60
cos
m
125
,
0
N
.080
1
m
N
135
N
1.080
m
N
35
1
OB
d
d
Fd
MO
cm
25
OB
18.
e) Embora cadauma das forças nas alineas b), c) e d)
gere o mesmo momento que a força de 450 N,
nenhuma tem sua mesma intensidade, direção e
sentido, ou sua mesma linha de ação. Portanto,
nenhuma das forças é equivalente à força de 450 N.
19.
Produto Escalar deDois Vetores
• O produto escalar de dois vetores P e Q é
definido como
escalar
resultado
cos
PQ
Q
P
• Produtos escalares:
- são comutativos,
- são distributivos,
- não são associativos,
P
Q
Q
P
2
1
2
1 Q
P
Q
P
Q
Q
P
indefinido
S
Q
P
• Produtos escalares em termos de componentes cartesianas:
0
0
0
1
1
1
i
k
k
j
j
i
k
k
j
j
i
i
k
Q
j
Q
i
Q
k
P
j
P
i
P
Q
P z
y
x
z
y
x
2
2
2
2
P
P
P
P
P
P
Q
P
Q
P
Q
P
Q
P
z
y
x
z
z
y
y
x
x
20.
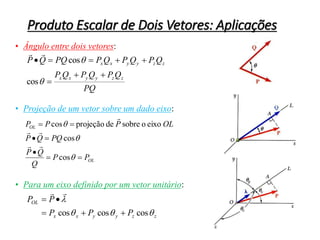
Produto Escalar deDois Vetores: Aplicações
• Ângulo entre dois vetores:
PQ
Q
P
Q
P
Q
P
Q
P
Q
P
Q
P
PQ
Q
P
z
z
y
y
x
x
z
z
y
y
x
x
cos
cos
• Projeção de um vetor sobre um dado eixo:
OL
OL
P
P
Q
Q
P
PQ
Q
P
OL
P
P
P
cos
cos
eixo
o
sobre
de
projeção
cos
z
z
y
y
x
x
OL
P
P
P
P
P
cos
cos
cos
• Para um eixo definido por um vetor unitário:
21.
Produto Triplo Mistode Três Vetores
• Produto triplo misto de três vetores:
escalar
resultado
Q
P
S
• Os seis produtos triplos mistos que podem ser
formados com S, P e Q têm o mesmo valor absoluto,
mas não necessariamente o mesmo sinal,
S
P
Q
Q
S
P
P
Q
S
P
S
Q
S
Q
P
Q
P
S
z
y
x
z
y
x
z
y
x
x
y
y
x
z
z
x
x
z
y
y
z
z
y
x
Q
Q
Q
P
P
P
S
S
S
Q
P
Q
P
S
Q
P
Q
P
S
Q
P
Q
P
S
Q
P
S
• Analisando o produto triplo misto tem-se,
22.
Momento de umaForça em Relação a um
Dado Eixo
• Momento MO de uma força F aplicada no
ponto A em relação a um ponto O:
F
r
MO
• O momento MOL em relação a um eixo OL é a
projeção do momento MO sobre esse eixo, ou seja,
F
r
M
M O
OL
• Momentos de F em relação aos eixos coordenados:
x
y
z
z
x
y
y
z
x
yF
xF
M
xF
zF
M
zF
yF
M
23.
Momento de umaForça em Relação a um
Dado Eixo
• Momento de uma força em relação a um
eixo arbitrário:
B
A
B
A
B
A
B
BL
r
r
r
F
r
M
M
• O resultado é independente do ponto B
escolhido sobre o eixo dado.
24.
Exercício de Aplicação
a)em relação a A
b) em relação à aresta AB
c) em relação à diagonal AG do cubo.
d) Determine a distância perpendicular
entre AG e FC.
Um cubo sofre a ação de uma força P
conforme mostrado. Determine o
momento de P:
25.
• Momento deP em relação a A:
k
j
P
j
i
a
M
k
j
P
k
j
P
P
j
i
a
j
a
i
a
r
P
r
M
A
A
F
A
F
A
2
2
2
2
k
j
i
aP
M A
2
• Momento de P em relação a AB:
k
j
i
aP
i
M
i
M A
AB
2
2
aP
M AB
Resolução
26.
• Momento deP em relação à diagonal AG:
1
1
1
6
2
3
1
2
3
1
3
aP
k
j
i
aP
k
j
i
M
k
j
i
aP
M
k
j
i
a
k
a
j
a
i
a
r
r
M
M
AG
A
G
A
G
A
A
AG
6
aP
M AG
Resolução
27.
• Distância perpendicularentre AG e FC:
0
1
1
0
6
3
1
2
P
k
j
i
k
j
P
P
Portanto, P é perpendicular a AG.
Pd
aP
M AG
6
6
a
d
Resolução
28.
Momento de umBinário
3 - 28
• Duas forças F e -F de mesma intensidade, linhas
de ação paralelas e sentidos opostos formam um
binário.
• Momento do binário:
Fd
rF
M
F
r
F
r
r
F
r
F
r
M
B
A
B
A
sen
• O vetor que representa o momento do
binário é independente da escolha da origem
dos eixos coordenados, isto é, trata-se de um
vetor livre que pode ser aplicado a qualquer
ponto produzindo o mesmo efeito
29.
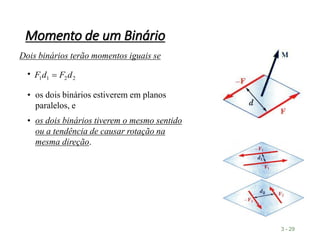
Momento de umBinário
3 - 29
Dois binários terão momentos iguais se
• 2
2
1
1 d
F
d
F
• os dois binários estiverem em planos
paralelos, e
• os dois binários tiverem o mesmo sentido
ou a tendência de causar rotação na
mesma direção.
30.
Adição de Binários
•Considere dois planos P1 e P2 que se
interceptam, cada um contendo um binário.
2
2
2
1
1
1
plano
no
plano
no
P
F
r
M
P
F
r
M
• As resultantes dos vetores também
formam um binário.
2
1 F
F
r
R
r
M
• Pelo teorema de Varignon,
2
1
2
1
M
M
F
r
F
r
M
• A soma de dois binários é um binário de
momento igual à soma vetorial dos momentos
dos dois.
31.
Binários Podem SerRepresentados por Vetores
• Um binário pode ser representado por um vetor igual em
intensidade, direção e sentido ao momento do binário.
• Vetores que representam binários obedecem à lei de
adição de vetores.
• Vetores binários são vetores livres, ou seja, o ponto de
aplicação não é relevante.
• Vetores binários podem ser decompostos em componentes
vetoriais.
32.
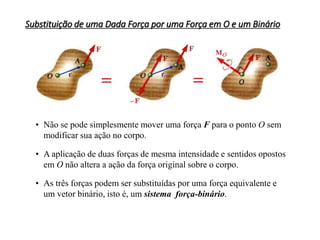
Substituição de umaDada Força por uma Força em O e um Binário
• Não se pode simplesmente mover uma força F para o ponto O sem
modificar sua ação no corpo.
• A aplicação de duas forças de mesma intensidade e sentidos opostos
em O não altera a ação da força original sobre o corpo.
• As três forças podem ser substituídas por uma força equivalente e
um vetor binário, isto é, um sistema força-binário.
33.
Substituição de umaDada Força por uma Força em O e um Binário
• Para mover a força F de A para um ponto diferente O’ deve-se
aplicar naquele ponto um vetor binário diferente MO’
F
r
MO
'
• Os momentos de F em relação a O e a O’ estão relacionados.
F
s
M
F
s
F
r
F
s
r
F
r
M
O
O
'
'
• Para mover o sistema força-binário de O para O’ deve-se
somar ao sistema o momento da força aplicada em O em
relação a O’.
Sistema de Forças:Redução a uma Força e um Binário
• Um sistema de forças pode ser substituído por um
sistema força-binário equivalente atuando em um dado
ponto O.
• As forças e os vetores binários podem ser substituídos
por uma força resultante e um vetor binário resultante,
F
r
M
F
R R
O
• O sistema força-binário em O pode ser movido
para O’ com a soma do momento de R em relação à
O’ , R
s
M
M R
O
R
O
'
• Dois sistemas de forças são equivalentes se eles podem
ser reduzidos a um mesmo sistema força-binário.
36.
Casos Particulares deRedução de um Sistema de Forças
• Se a força resultante e o binário em O forem mutuamente
perpendiculares, o sistema pode ser substituído por uma
única força que atua ao longo de uma nova linha de ação.
• O sistema força-binário resultante para um sistema de
forças será mutuamente perpendicular se:
1) as forças forem concorrentes,
2) as forças forem coplanares, ou
3) as forças forem paralelas.
37.
Casos Particulares deRedução de um Sistema de Forças
• O sistema de forças coplanares é reduzido
a um sistema força-binário que consiste
em , que são mutuamente
perpendiculares.
R
O
M
R
e
• O sistema pode ser reduzido a uma
única força movendo-se a linha de ação
de até que seu momento em relação a
O se torne .
R
O
M
R
• Em termos de componentes retangulares,
R
O
x
y M
yR
xR
38.
Exercicio de Aplicação
Paraa viga acima, reduza o sistema de
forças dado a (a) um sistema força-
binário equivalente em A, (b) um
sistema força binário equivalente em B,
e (c) a uma força única ou resultante.
Observação: Como as reações de apoio
não estão incluídas, esse sistema não
manterá a viga em equilíbrio.
SOLUÇÃO:
a) Calculamos a força resultante para
as forças mostradas e o binário
resultante para os momentos das
forças em relação a A.
b) Encontramos um sistema força-
binário em B equivalente ao
sistema força-binário em A.
c) Determinamos o ponto de
aplicação para a força resultante
de tal forma que seu momento em
relação a A seja igual ao binário
resultante em A.