Baixar para ler offline










![34
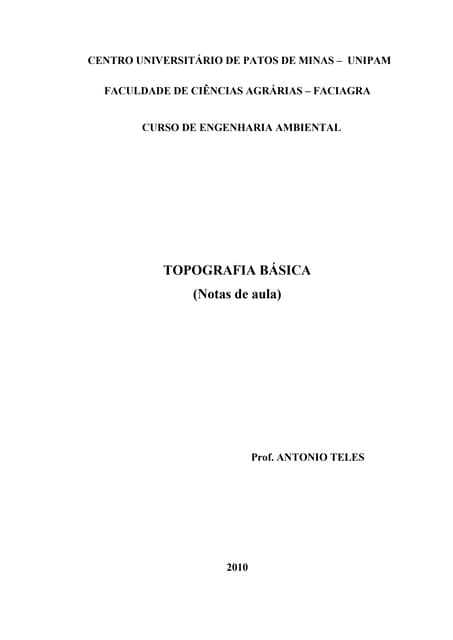
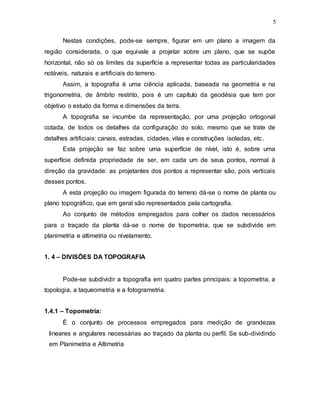
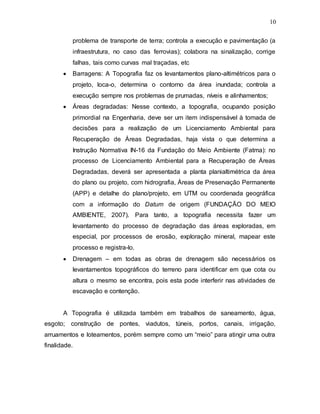
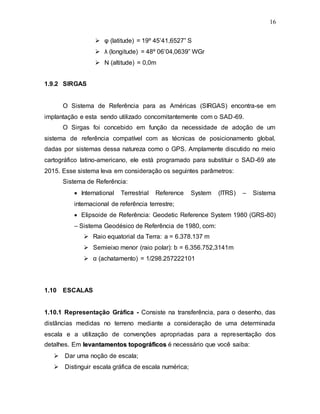
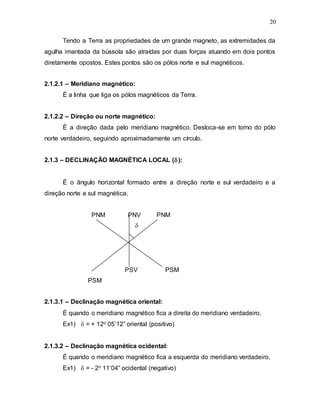
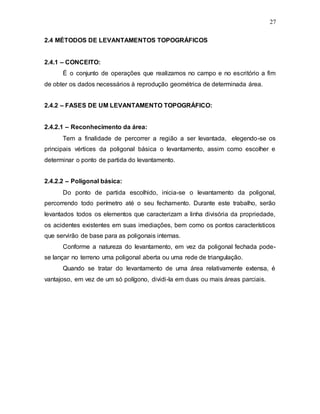
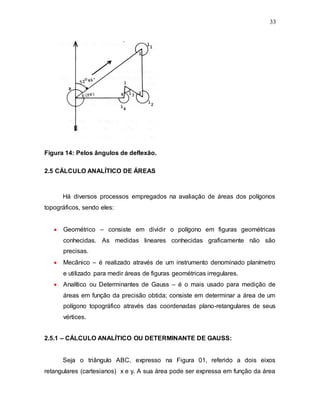
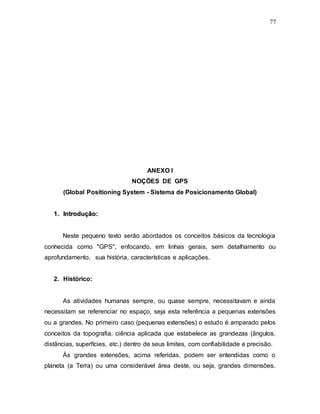
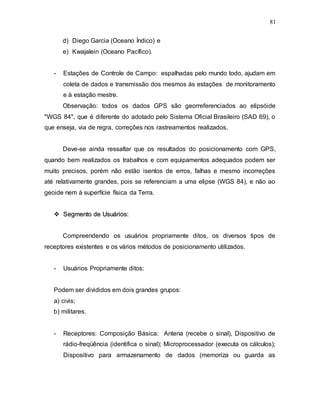
de três trapézios. Considerando os trapézios DBCF, DBAE e EACF, a área do
triângulo ABC pode da seguinte forma ser estimada:
Figura 15: Determinante de Gauss.
S (ABC) = [(DB + FC)/2 x DF] – [(FC + EA)/2 x EF] – [(EA + DB)/2 x DE
Os elementos que figuram na expressão anterior correspondem as
ordenadas e abscissas dos vértices A, B e C.
Substituindo, tem-se:
S (ABC) = [(x + x1)/2 . (y – y1)] –[(x1 +x2)/2 . (y1 – y2)] – [(x2 + x)/2 . (y2 – y)]
S (ABC) = ½ [ (x + x1) (y – y1) + (x1 +x2) (y1 – y2) + (x2 + x) (y2 – y)
2S (ABC) = [(x1y2 + x2y + xy1) – (y1x2 + y2x + yx1)]
2.5.2 – CÁLCULO DE ÁREAS EXTRAPOLIGONAIS:
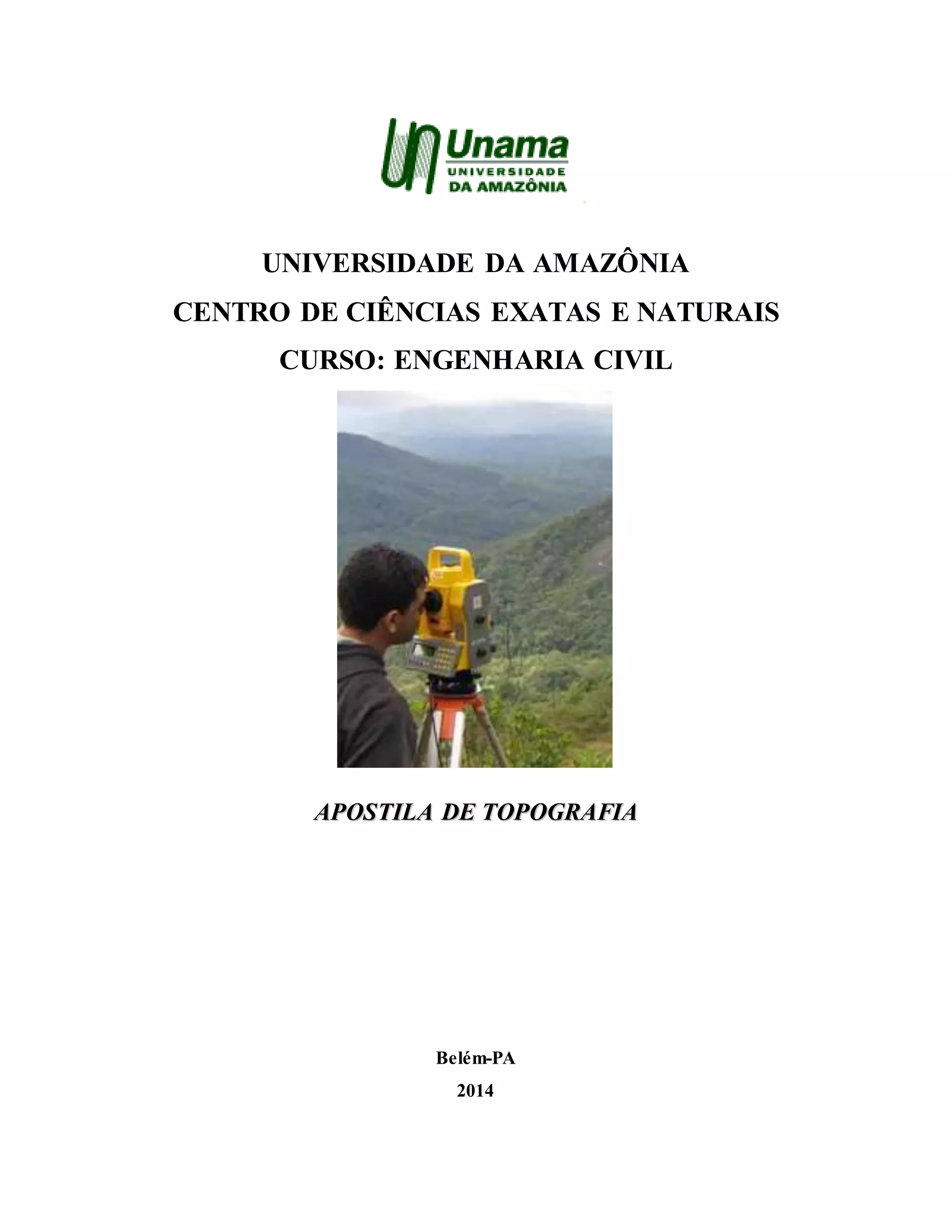
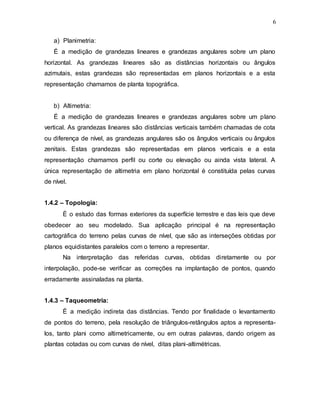
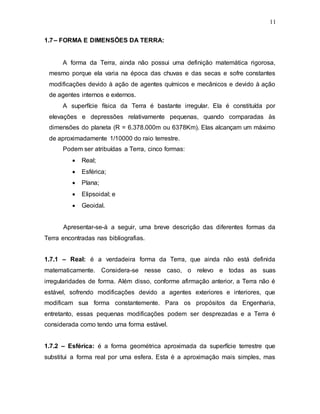
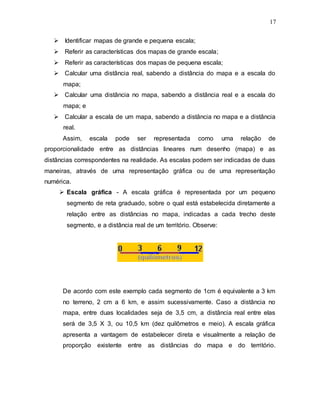
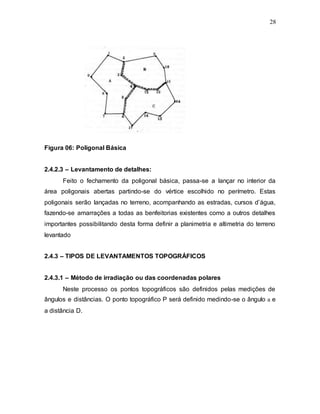
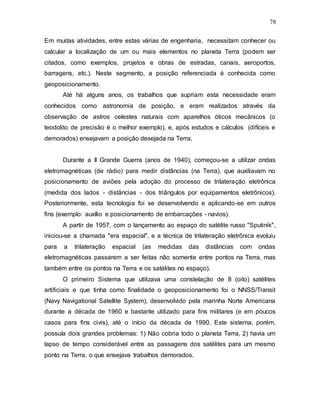
2.5.2.1 – Fórmula dos trapézios ou de Bezout:
Supondo-se uma sucessão de trapézios, todos com a mesma altura d,
conforme a Figura 02, a área calculada pela fórmula de Bezout (SB) será:](https://image.slidesharecdn.com/apostilatopografia-2014-210412114736/85/Apostila-topografia-Unama-34-320.jpg)
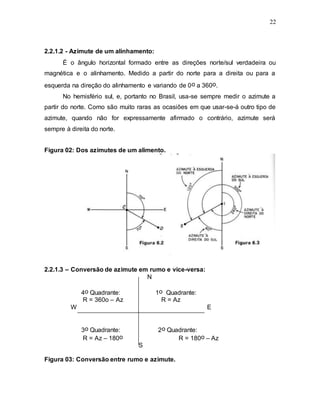
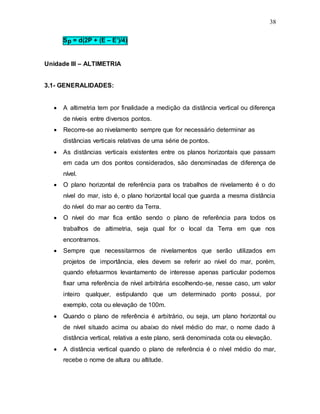
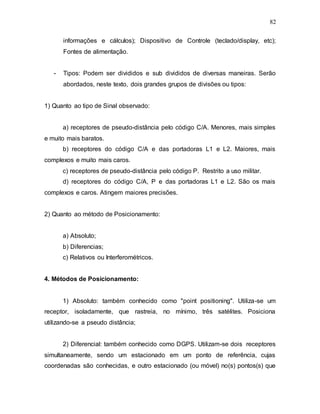
![35
Figura 16: Método de Bezout
SB = [(y1 + y2)/2 . d] + [(y2 + y3)/2 . d] + [(y3 + y4)/2 . d] + ... + [(y6 + y7)/2 . d] + [(y7 +
y8)/2 . d]
Pondo em evidência d/2
SB = d/2 (y1+ 2y2 + 2y3 + ... + 2y7 + y8)
Resumindo:
SB = d/2 (E + 2M)
Onde:
E = y dos extremos;
M = y dos meios.
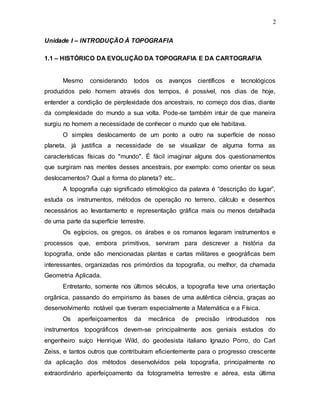
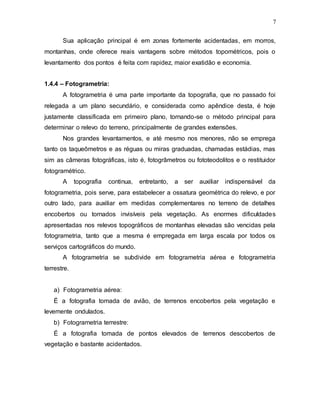
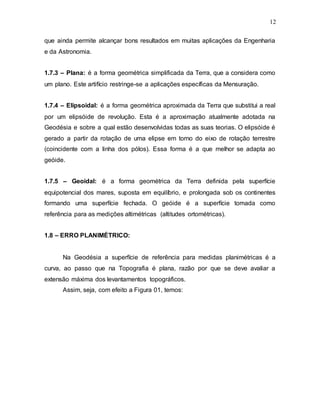
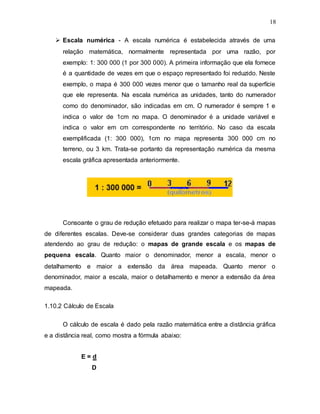
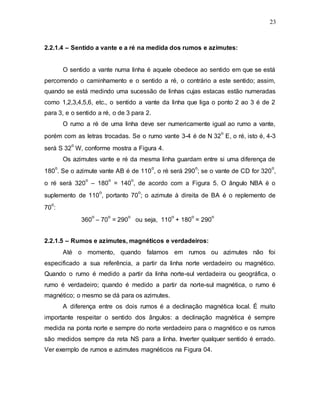
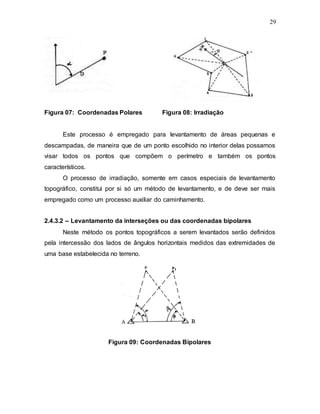
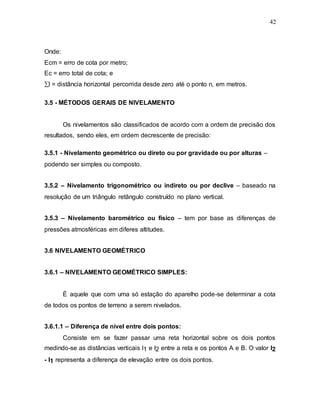
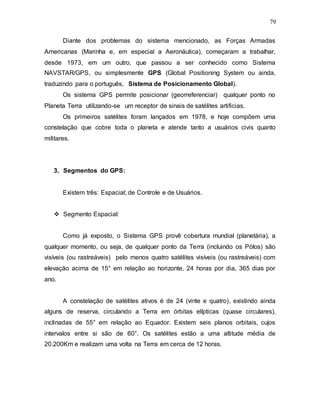
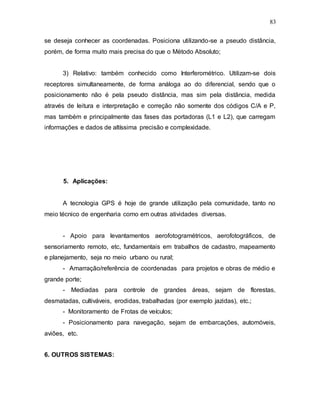
2.5.2.2 – Fórmula de Simpson:
Seja um número par de trapézios de mesma altura d (Figura 03 e 04). A
área calculada pela fórmula de Simpson (Ss) será:
Figura 17: Método de Simpson. Figura 18: Colocando 3 e 5 em
evidência](https://image.slidesharecdn.com/apostilatopografia-2014-210412114736/85/Apostila-topografia-Unama-35-320.jpg)
























1) O documento discute a evolução histórica da topografia e cartografia, desde os primeiros deslocamentos humanos até os avanços científicos e tecnológicos modernos. 2) A topografia é definida como o estudo dos métodos e instrumentos para medir e representar graficamente parte da superfície terrestre, enquanto a cartografia é a ciência, técnica e arte de mapear a terra. 3) A topografia se divide em topometria, topologia, taqueometria e fotograme