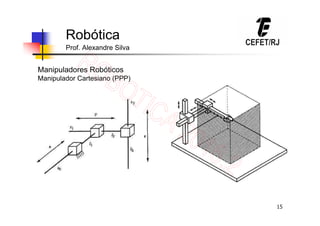
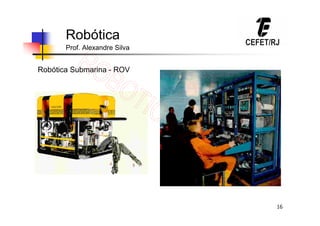
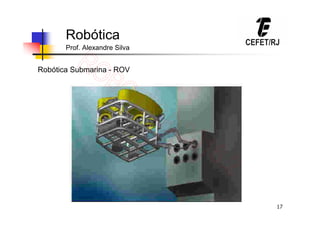
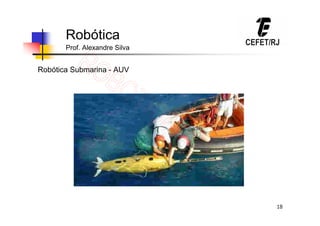
O documento apresenta uma introdução à robótica, definindo o termo robô, suas origens e primeiros desenvolvimentos ao longo da história. Também descreve as principais leis da robótica de acordo com Isaac Asimov e apresenta os principais componentes e ferramentas para programação de robôs Lego, incluindo manipuladores, sensores e software.