Baixado 22 vezes














































![Introdução à Programação com Robôs Lego Projeto Levando a Informática do Campus ao Campo
ReferênciasReferências
• MORAES, Paulo Sérgio de. Curso Básico de Lógica de Programação, Unicamp -
Centro de Computação, 2000.
• [Online] What is NXT? - http://mindstorms.lego.com/en-us/whatisnxt/default.aspx
• [Online] NXT Tutorial - http://www.ortop.org/NXT_Tutorial/index.html
• Manual de Programação para o NXT software - Educação Tecnológica. ZOOM Ed.
Educacional Ltda, 2003. 2003.
Introdução à Programação com Robôs Lego está sob a
Licença Creative Commons Atribuição-Não a obras Derivadas.
8282](https://image.slidesharecdn.com/apostilaprogramaorobs1-111023145650-phpapp02-140906185001-phpapp01/85/Apostila-programacao-82-320.jpg)


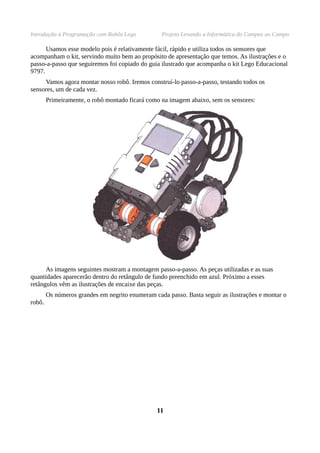
1. O documento introduz programação com robôs Lego e descreve o kit Lego Mindstorms NXT, incluindo seus componentes como sensores, motores e o Brick NXT. 2. É explicado o que cada parte do Brick NXT faz, como os botões, portas, visor e alto-falante. Também são detalhados cada um dos 4 sensores incluídos e suas funções. 3. O documento servirá de guia para a montagem e programação de um robô Lego usando o software e os componentes do kit NXT.





































