Baixado 15 vezes
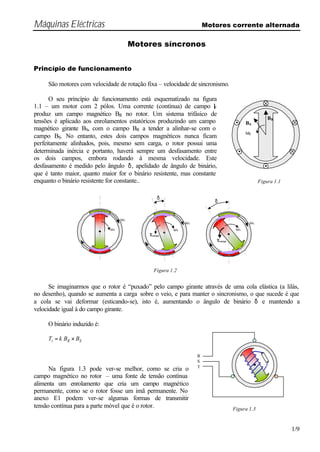







Este documento descreve o funcionamento de motores síncronos. (1) Os motores síncronos têm uma velocidade de rotação fixa e funcionam com o rotor a alinhar-se com o campo magnético girante estatórico. (2) O binário induzido depende do ângulo de desfasamento entre os campos magnético e o binário máximo ocorre quando o ângulo é de 90 graus. (3) A corrente de campo pode ser controlada para controlar o fator de potência do motor, permitindo que ele consuma ou for


































































