Baixar para ler offline




![RENDIMENTO DOS MOTORES ή
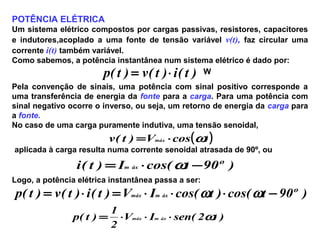
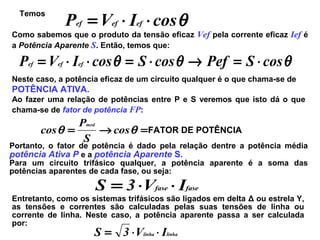
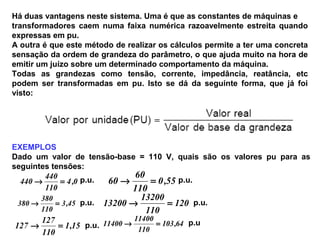
Um motor elétrico absorve energia elétrica da rede e a transforma em
energia mecânica disponível no eixo. O rendimento desta máquina define a
eficiência com que é feita esta transformação. Seu cálculo é dada pela
relação entre a potência útil entregue ao eixo potência mecânica e a
potência ativa retirada da rede potência elétrica:
ϕϕ
η
cosIV3
P1000
cosIV3
P736
P
P kWCV
Elétrica
Mecânica
⋅⋅⋅
⋅
=
⋅⋅⋅
⋅
==
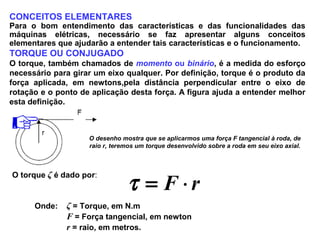
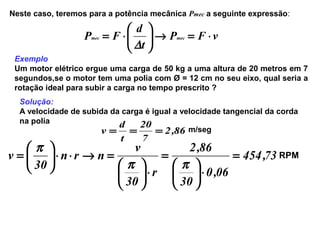
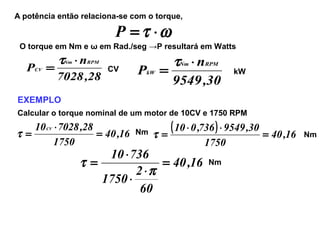
RELAÇÃO ENTRE TORQUE OU CONJUGADO E POTÊNCIA
Quando a energia mecânica é aplicada sob a forma de movimento rotativo, a
potência desenvolvida depende do Torque ζ e da velocidade de rotação n.
As relações entre si são:
ω
τ
WattsP
= Newtons metro [Nm]
Onde:
P =Potência em watts
ω =Velocidade angular em Radianos/segundo
ζ = Torque em Newtons metro
Com a rotação n em rotações por minuto RPM,
60
2
n
π
ω
⋅
⋅= em Rad/seg](https://image.slidesharecdn.com/clic-aqui-180410171918/85/Clic-aqui-28-320.jpg)





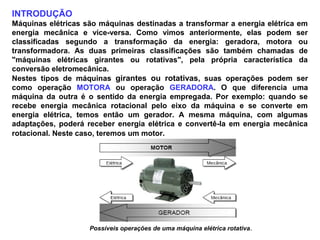
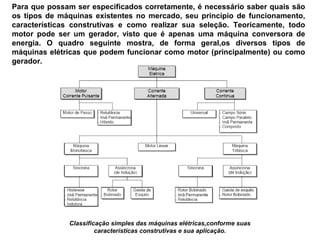
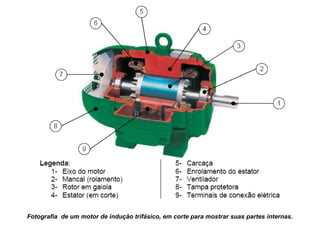
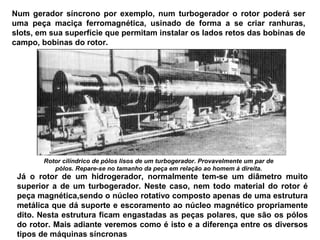
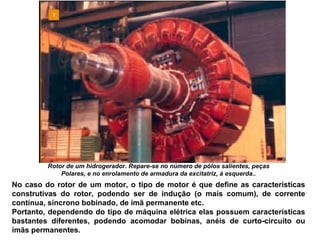
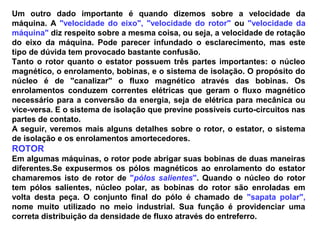
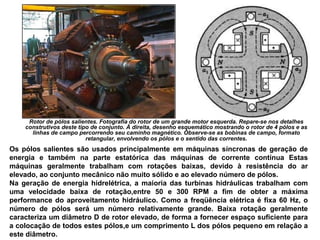
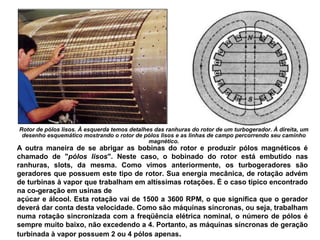
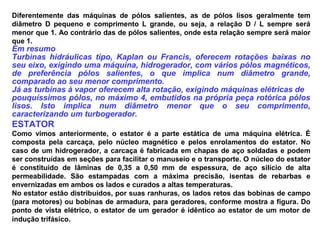
O documento descreve os principais tipos de máquinas elétricas girantes, incluindo suas partes e operações. É apresentada uma classificação simples destas máquinas de acordo com suas características construtivas e aplicações, distinguindo entre rotores de pólos salientes e lisos. Também são definidos conceitos-chave como estator, rotor, isolamento e enrolamento amortecedor.





















![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)































