Transferir como PDF, PPTX
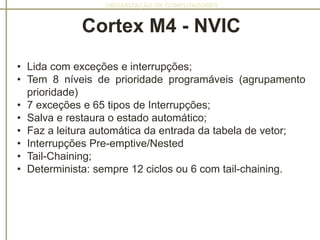
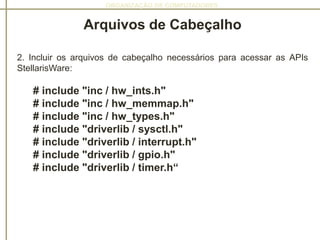
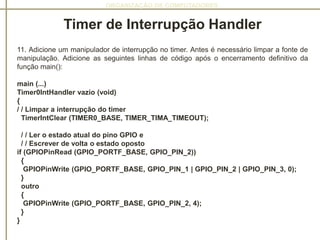
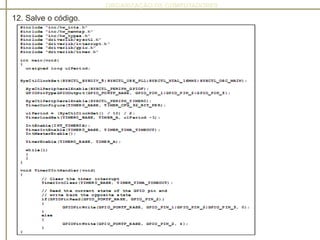
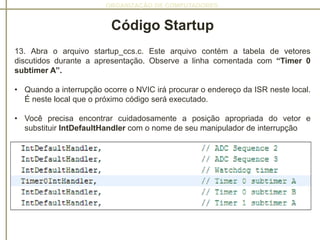
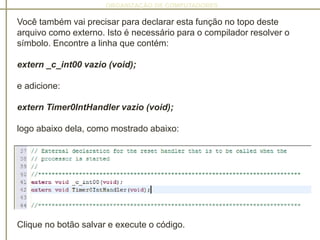
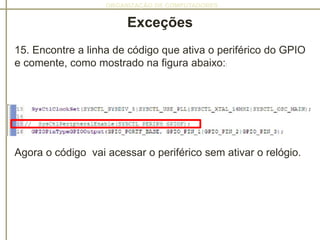

O documento discute interrupções e timers no ARM Cortex-M4. Ele explica como configurar um timer para gerar interrupções a cada meio período de um sinal de 10Hz, fazendo com que um LED pisque. Também mostra como gerar uma exceção ao acessar um periférico antes de ativar seu relógio.























































































