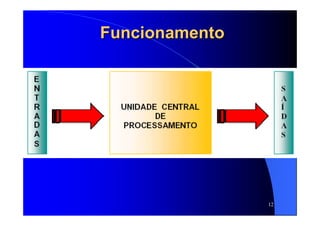
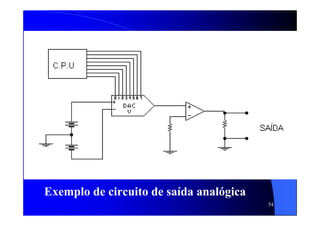
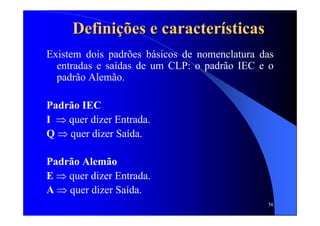
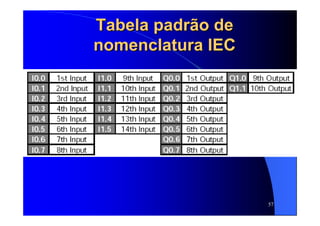
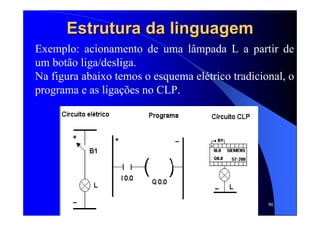
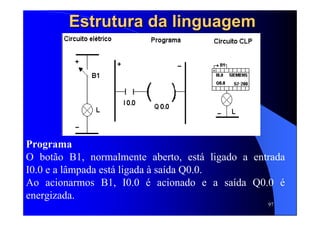
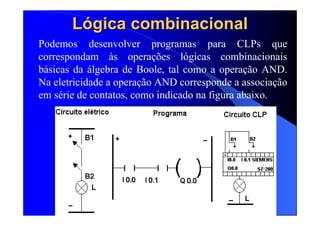
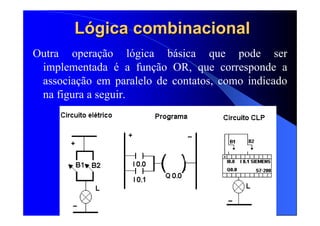
O documento descreve os principais componentes e funcionamento de controladores lógicos programáveis (CLP). Apresenta a evolução dos sistemas de controle desde relés até controladores programáveis modernos e detalha os componentes de hardware de um CLP, incluindo memória, processador, módulos de entrada e saída e portas de comunicação.




![[E-BOOK 1] - Comandos Elétricos 1.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book1-comandoseltricos1-230731223144-ae158a59-thumbnail.jpg?width=640&height=640&fit=bounds)






![[E-BOOK 2] - Comandos Elétricos 2.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book2-comandoseltricos2-230731223144-16085388-thumbnail.jpg?width=640&height=640&fit=bounds)



























































