Transferir como PDF, PPTX



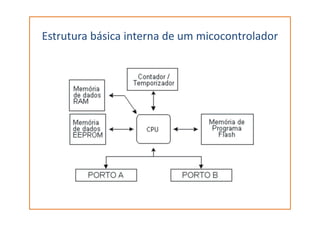
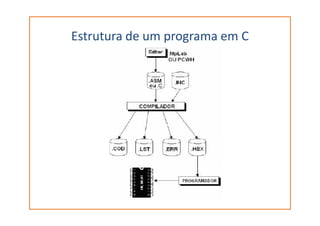
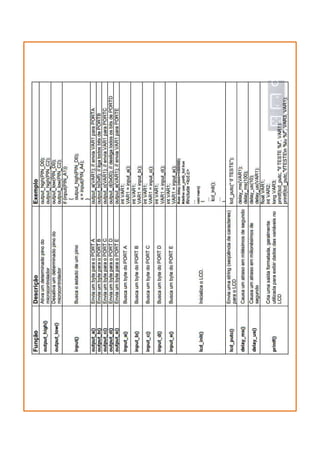
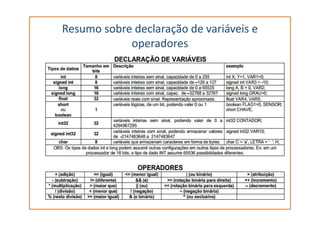
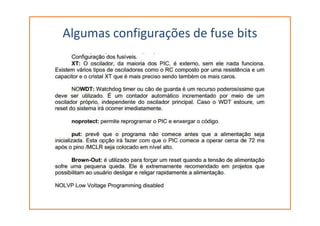
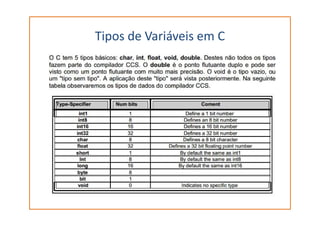
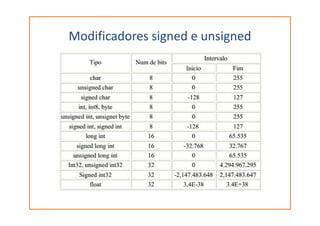
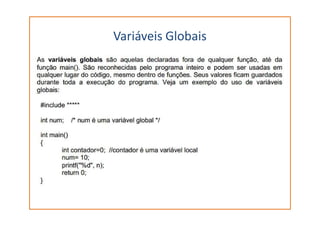
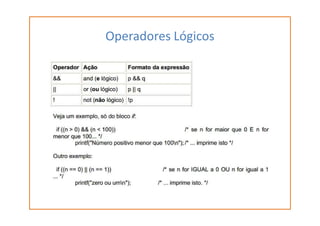
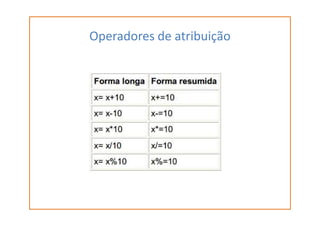
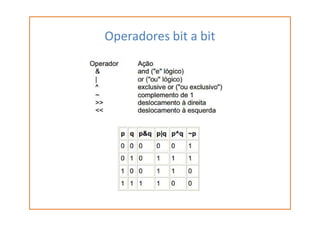
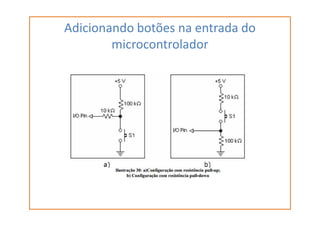
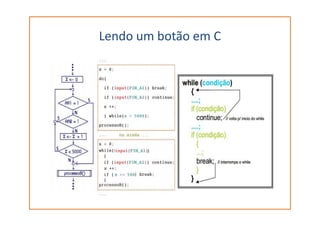
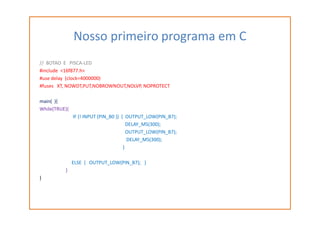
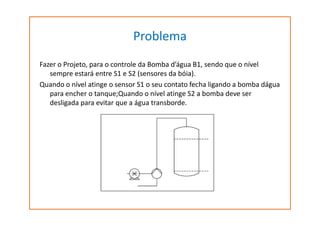
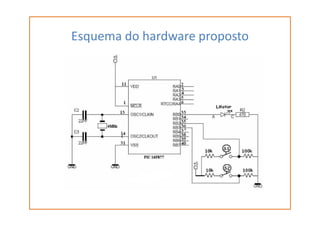

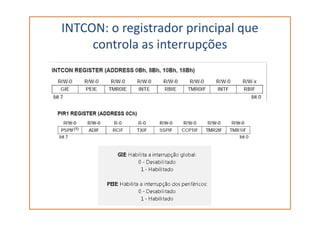
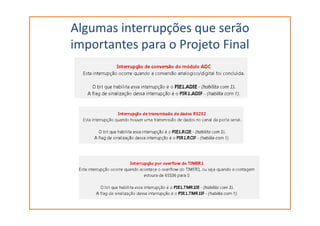
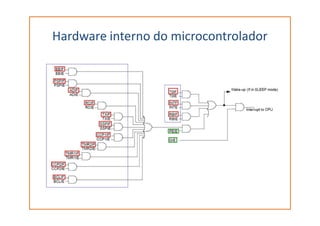
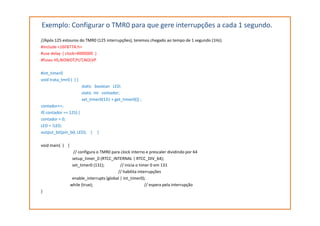
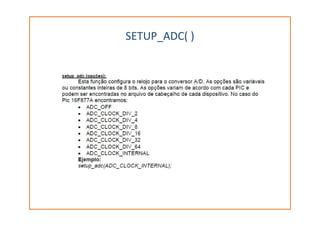
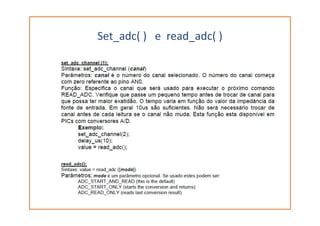
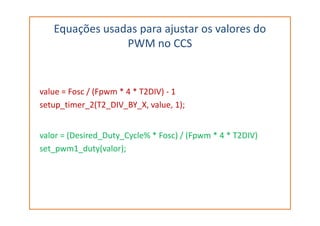
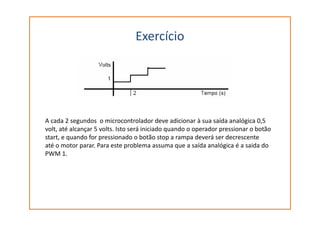
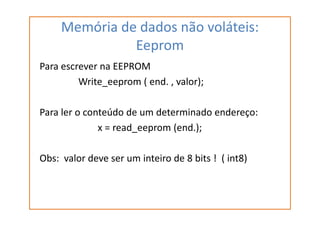
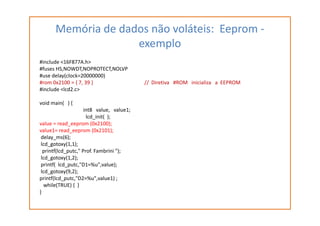
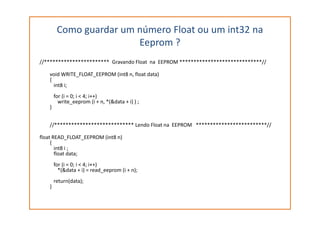

O documento discute microcontroladores PIC e programação em linguagem C. Apresenta tópicos como estrutura interna dos microcontroladores PIC, declaração de variáveis, operadores, entrada e saída digital, conversor AD, interrupções e uso da memória EEPROM.


























































![[3/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/02-stm32f7-p1-171031095110-thumbnail.jpg?width=640&height=640&fit=bounds)








