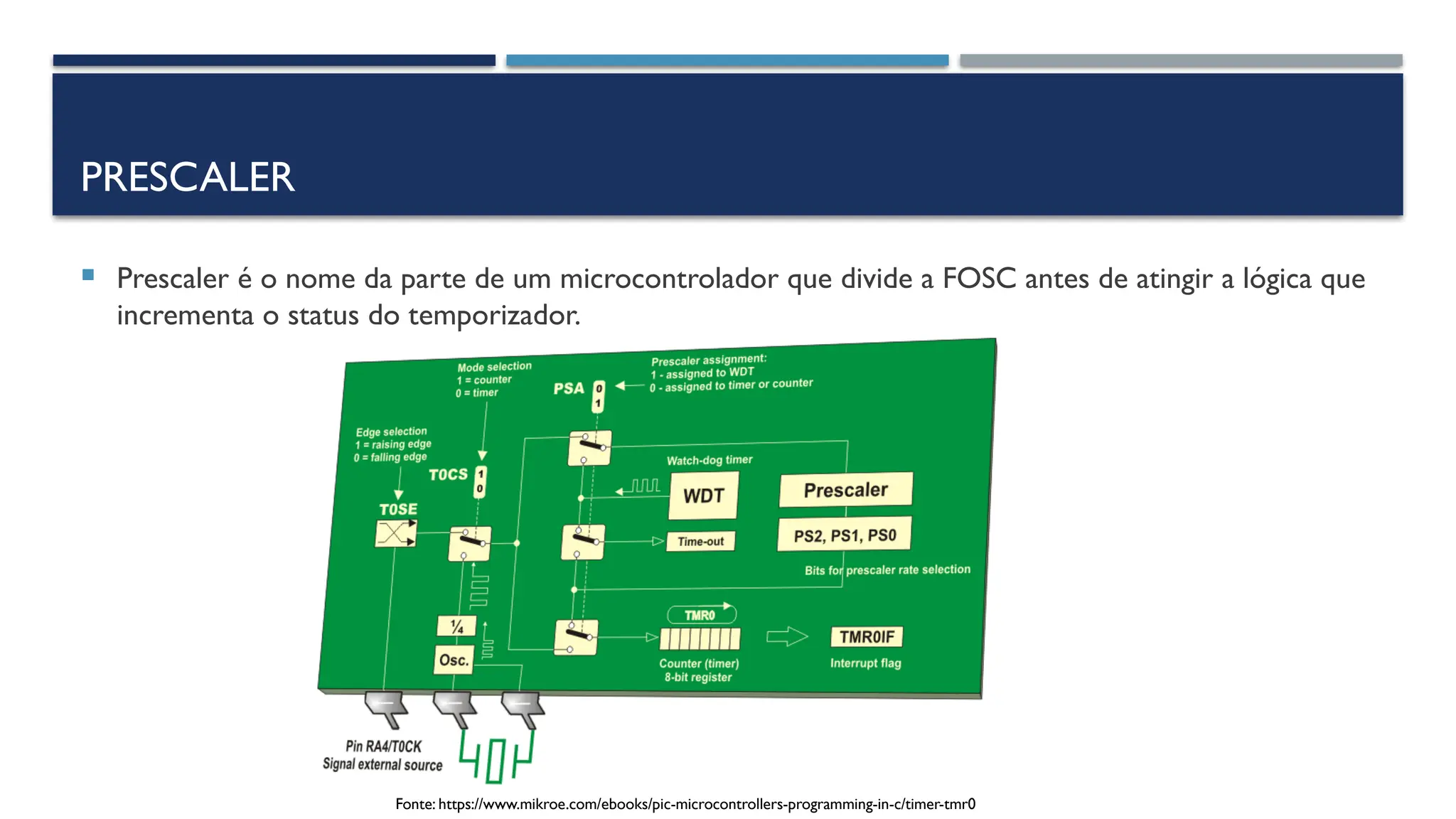
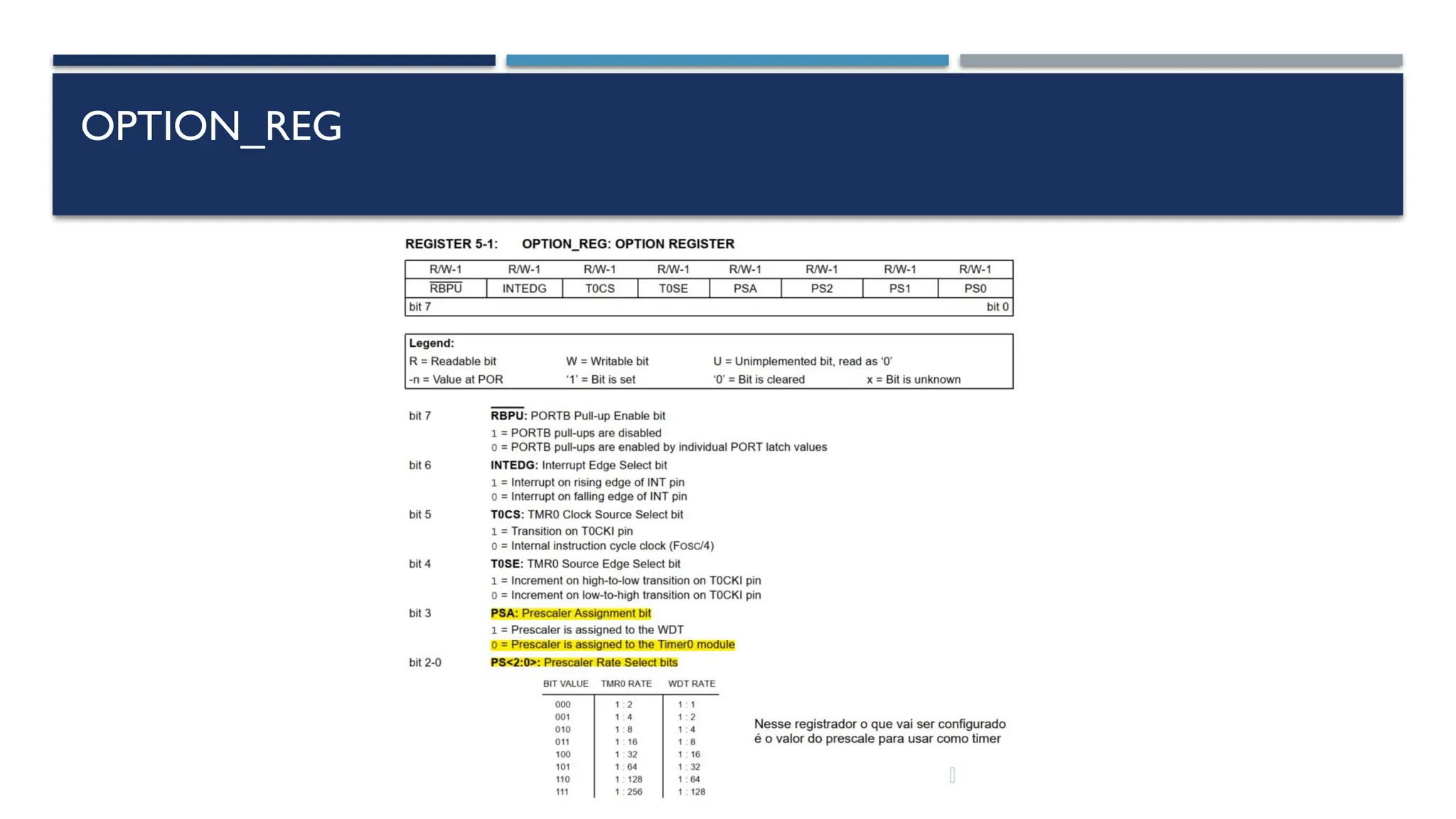
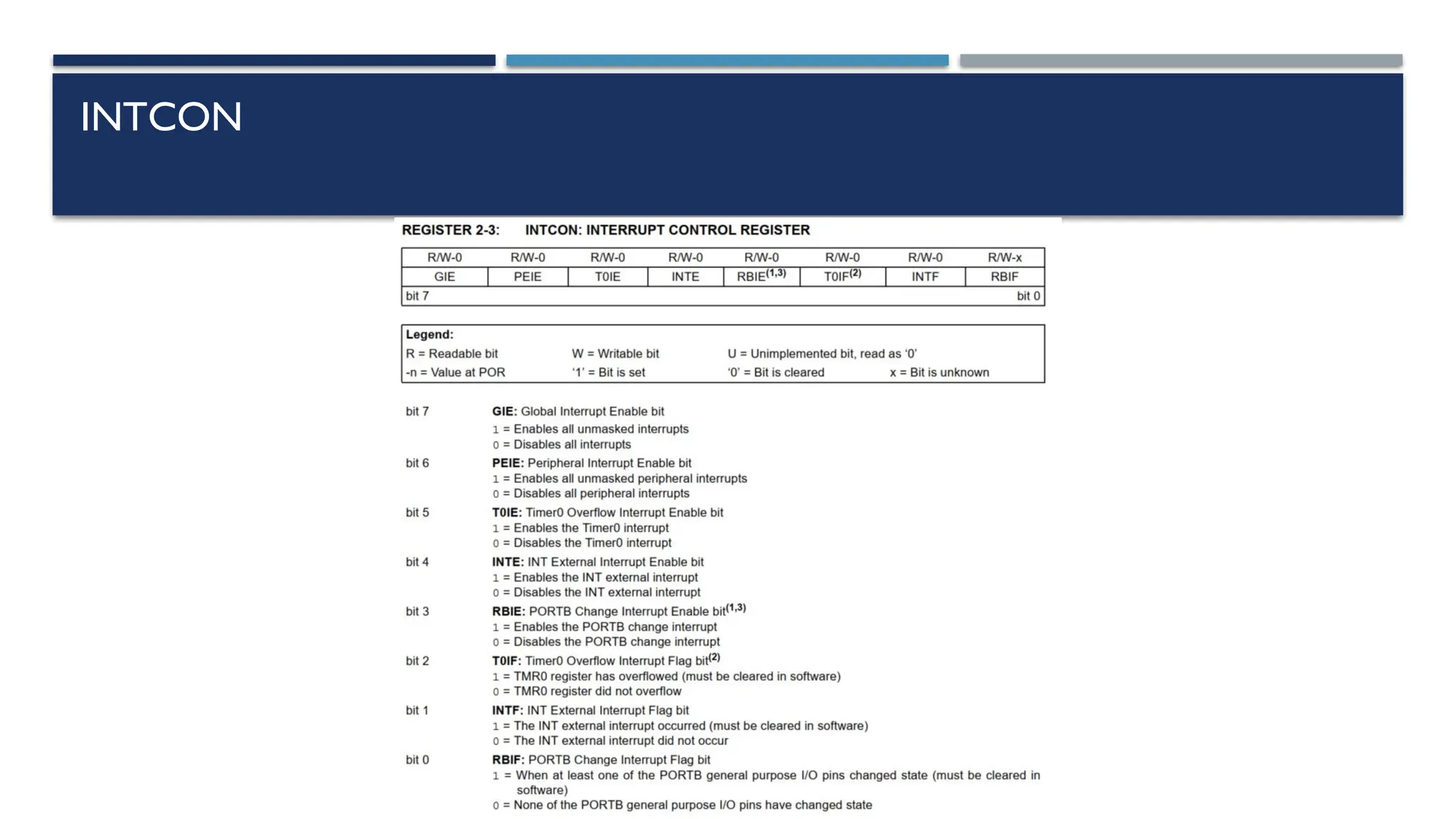
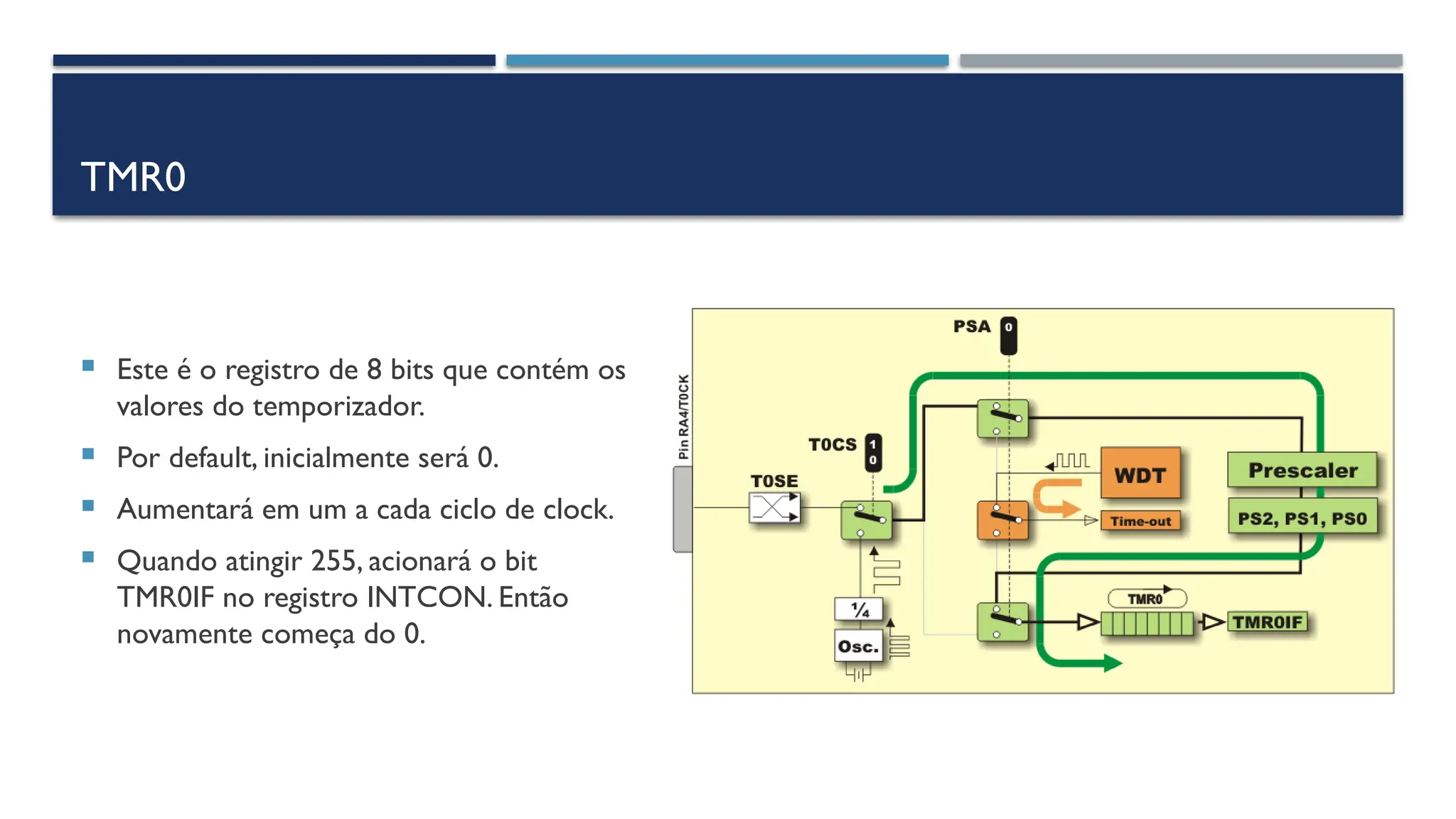
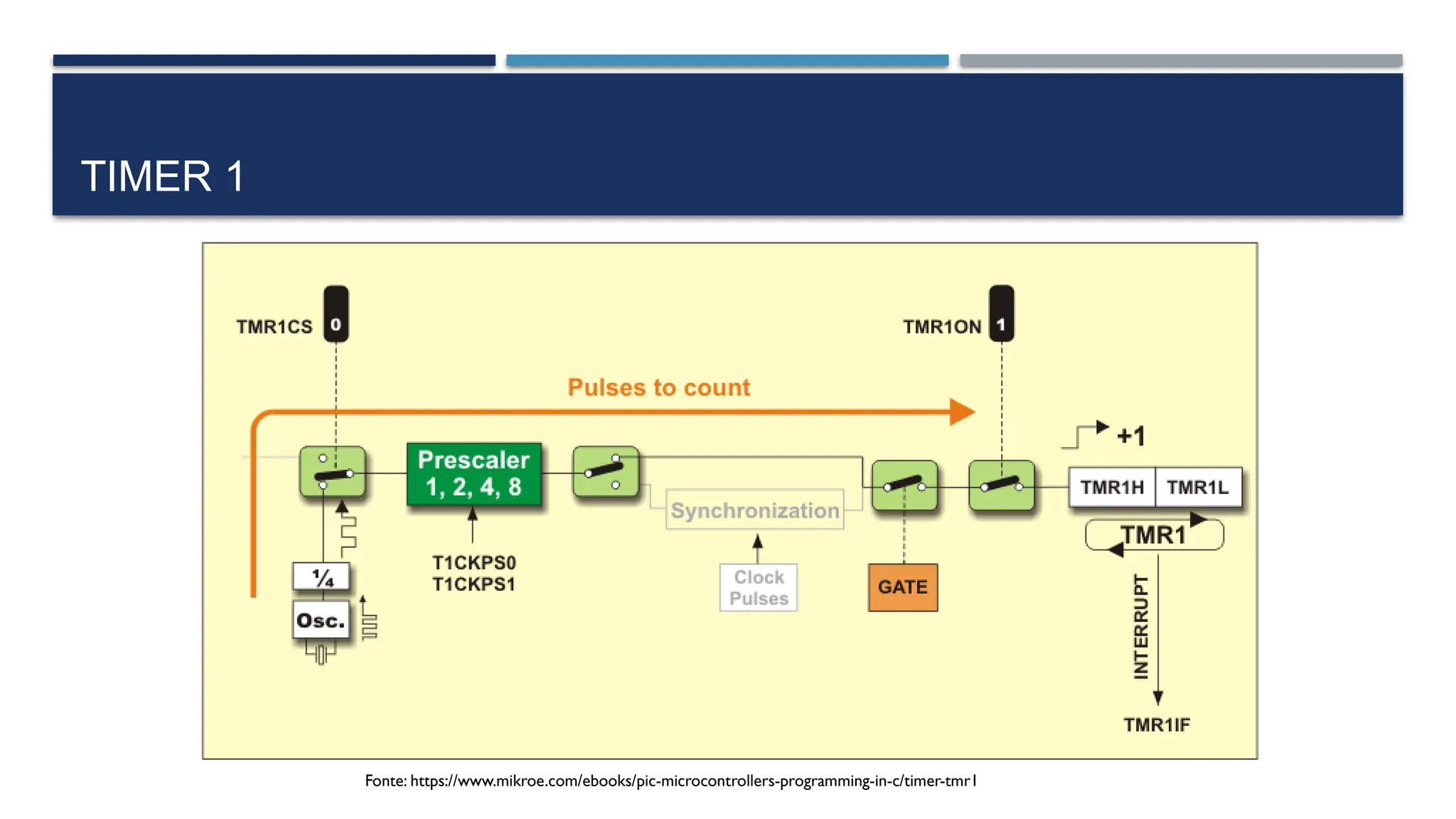
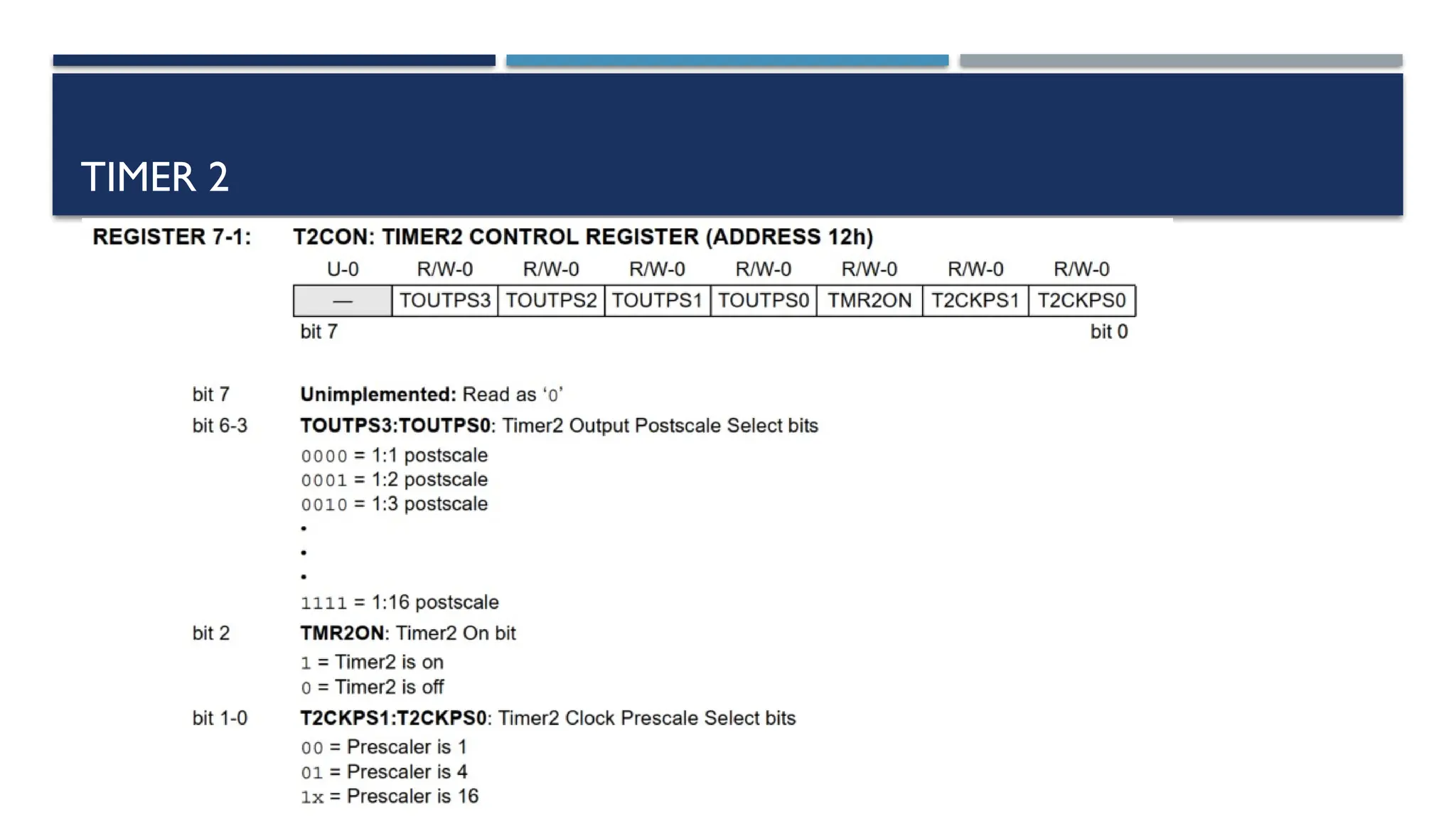
O documento descreve o funcionamento de timers e interrupções em microcontroladores PIC, incluindo o PIC16F877A, com detalhes sobre três tipos de timers: Timer0 (8 bits), Timer1 (16 bits) e Timer2 (8 bits). Também aborda o funcionamento do watchdog como um sistema de supervisão que reinicializa o microcontrolador em caso de falha e a configuração do prescaler. São apresentadas atividades práticas relacionadas ao uso dos timers para programação de controle de saídas e contadores.