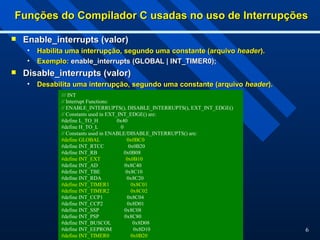
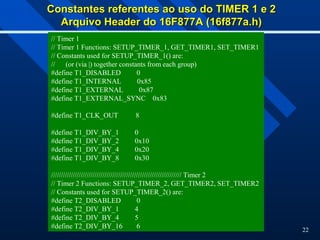
1. O documento discute interrupções e timers no microcontrolador PIC, especificamente no PIC16F877A.
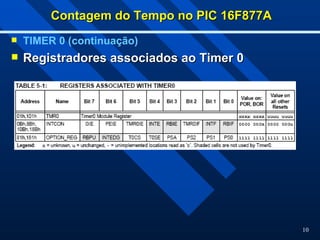
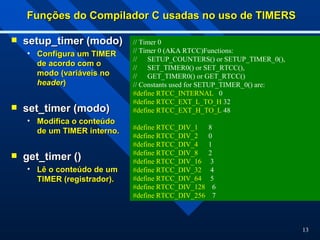
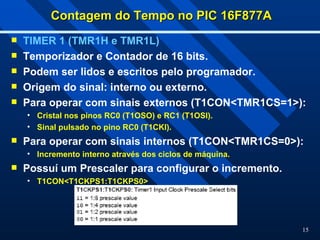
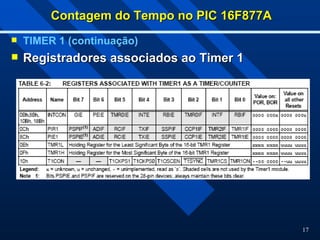
2. Apresenta as características e funcionalidades dos timers TMR0, TMR1 e TMR2, assim como suas respectivas funções no compilador C.
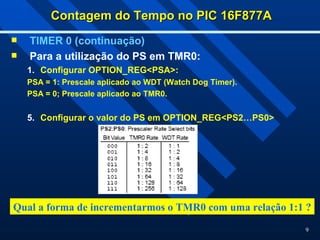
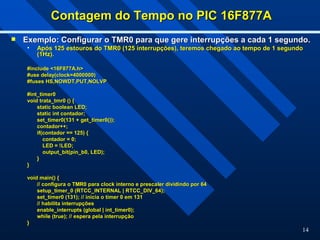
3. Fornece um exemplo de como configurar o TMR0 para gerar interrupções a cada 1 segundo utilizando prescaling e contagem programada.