Baixado 255 vezes
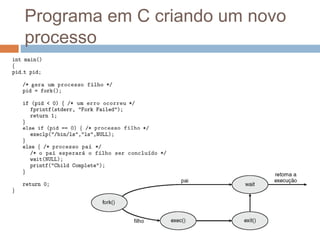
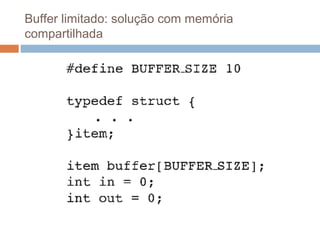
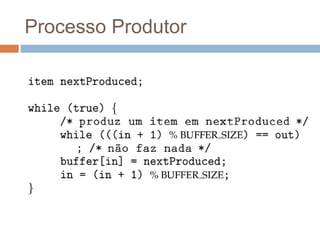
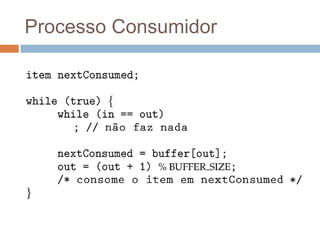
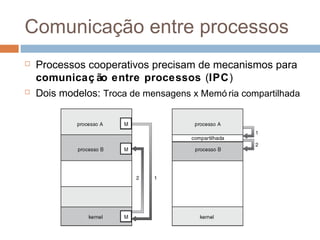

O documento aborda o conceito de processos em sistemas operacionais, descrevendo suas funcionalidades, estados e mecânicas de criação e término. Explora também a comunicação entre processos, apresentando métodos como troca de mensagens e memória compartilhada, além de discutir os processos cooperativos e as implicações de escalonamento. Exemplos práticos e conceitos de comunicação em sistemas cliente-servidor, como sockets e chamadas remotas de procedimentos, são discutidos para ilustrar o material.