Baixado 390 vezes
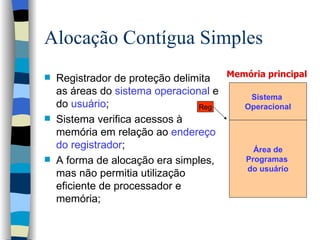
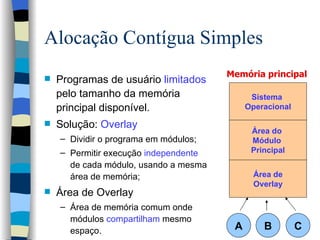
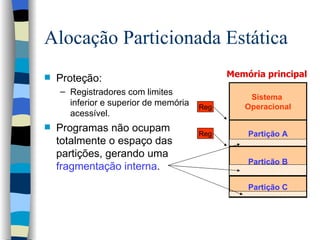
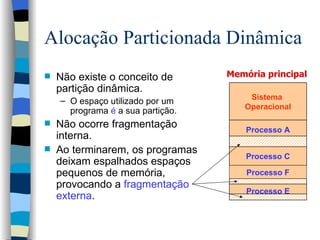
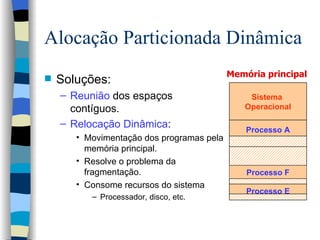
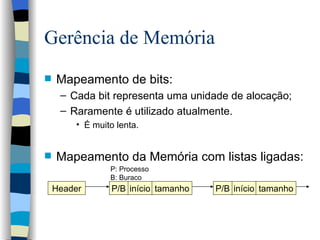
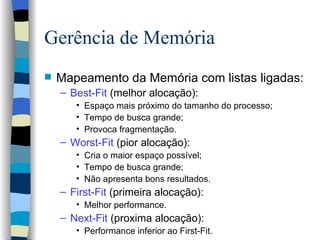
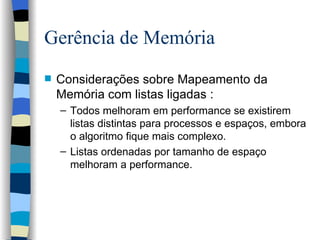
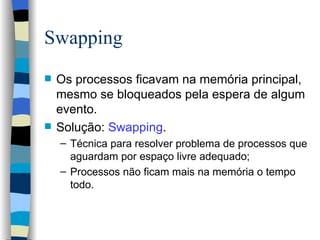
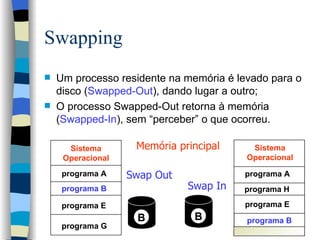

O documento discute técnicas de gerenciamento de memória em sistemas operacionais, incluindo alocação contígua, particionada estática e dinâmica, mapeamento de memória com listas ligadas, e a técnica de swapping para alternar processos entre memória principal e secundária.