Processos
Conceito deprocesso;
Criação e término de um processo;
Estado de um processo;
Implementação de processos;
Fila de processo;
Escalonador;
Comunicação entre processos;
3.
Processos
Um programaem execução;
A execução do processo deve progredir de modo
sequencial;
Um SO executa diversos programas:
Sistemas batch – jobs;
Sistemas compartilhados no tempo – programas ou tarefas
do usuário;
Normalmente job e processo são sinônimos;
4.
Processos
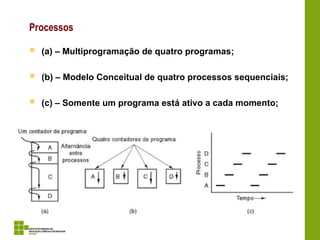
(a) –Multiprogramação de quatro programas;
(b) – Modelo Conceitual de quatro processos sequenciais;
(c) – Somente um programa está ativo a cada momento;
5.
Processos
Um processoinclui:
Contador de programa (fluxo de controle);
Pilha;
Seção de dados;
6.
Processos
Exemplo:
Processo– Fazer um bolo:
Receita do bolo (programa/algoritmo);
Ingredientes (dados de entrada);
Materiais de cozinha (recursos);
Cozinheiro (processador);
Processo – Socorro médico:
Registra onde parou o processo anterior (estado do
processo);
Busca um livro de primeiro socorros;
Segue as instruções;
Volta para o processo anterior;
7.
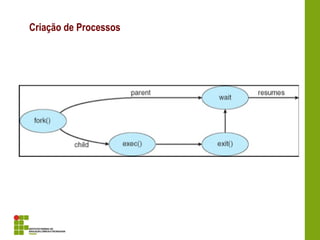
Criação de Processos
É criado por um processo existente executando uma
chamada de sistema para a criação de processo;
Processo pai cria processos filho que, por sua vez, criam
outros processos, formando uma árvore de processos:
Compartilhamento de recursos;
Pai e filhos compartilham todos os recursos;
Filhos compartilham subconjunto dos recursos do pai;
Pai e filho não compartilham recursos;
Execução:
Pai e filhos executam simultaneamente;
Pai espera até que filhos terminem;
8.
Criação de Processos
Espaço de endereços:
Filho duplica do pai;
Filho tem um programa carregado;
Exemplos do UNIX:
Chamada do sistema fork cria novo processos;
Chamada do sistema exec usada após um fork para
substituir o espaço de memória do processo por um novo
programa;
Exemplos do Windows:
Chamada do sistema CreateProcess cria novo processos;
9.
Criação de Processos
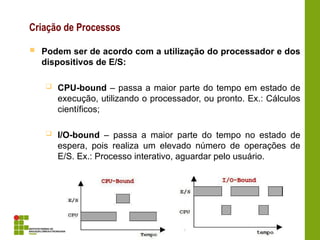
Podem ser de acordo com a utilização do processador e dos
dispositivos de E/S:
CPU-bound – passa a maior parte do tempo em estado de
execução, utilizando o processador, ou pronto. Ex.: Cálculos
científicos;
I/O-bound – passa a maior parte do tempo no estado de
espera, pois realiza um elevado número de operações de
E/S. Ex.: Processo interativo, aguardar pelo usuário.
10.
Criação de Processos
Podem utilizar dois meios de comunicação:
Foreground (primeiro plano) – interagem com usuários;
Background (segundo plano) – não estão associados a
usuários em particular;
Também chamado de Daemon;
Ex.: aceitar mensagens eletrônicas sendo recebidas,
comando ps linux, gerenciador de tarefas windows, clicar
em um icone de programa no SO;
Término de umProcesso
Mais cedo ou mais tarde o novo processo terminará,
normalmente em razão de alguma das seguintes condições:
Saída normal (voluntária);
Saída por erro (voluntária);
Erro fatal (involuntário);
Cancelamento por um outro processo (involuntário)
13.
Término de umProcesso
Exemplos do UNIX:
Chamada do sistema exit – saída normal;
Chamada do sistema kill – saída por outro processo;
Exemplos do Windows:
Chamada do sistema ExitProcess;
Chamada do sistema TerminateProcess – saída por outro
processo;
14.
Término de umProcesso
Processo executa última instrução e pede ao SO para excluí-
la (exit):
Dados de saída do filho para o pai (via wait);
Recursos do processo são desalocados pelo SO;
Pai pode terminar a execução dos processos dos filhos
(abort):
Filho excedeu recursos alocados;
Tarefa atribuída ao filho não é mais exigida;
Se o pai estiver saindo:
Alguns SO não permitem que o filho continue se o pai
terminar;
Todos os filhos terminam – término em cascata;
15.
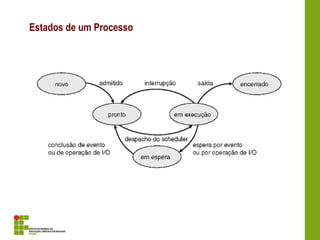
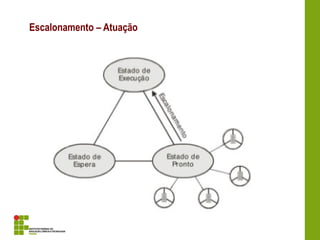
Estados de umProcesso
Novo:
Processo está sendo criado;
Executando (running):
Instruções estão sendo executadas;
Esperando (wait):
Processo está esperando que ocorra algum evento;
Pronto (ready):
Processo está esperando para ser executado;
Terminado:
Processo terminou a execução;
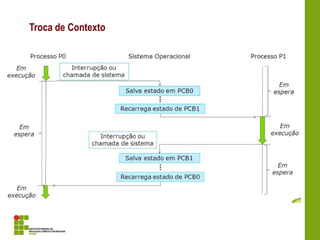
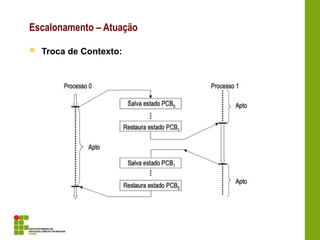
Troca de Contexto
Quando a CPU passa para outro processo, o sistema deve
salvar o estado do processo antigo e carregar o estado
salvo para o novo processo;
O tempo de troca de contexto é overhead;
O sistema não realiza trabalho útil enquanto faz a troca;
Tempo dependente do suporte do hardware;
Implementação de processos
É criada uma tabela de processos, com uma entrada para
cada processo;
Alguns autores chamam essa tabela de PCB – Process
Control Block;
Ela contém informações associadas a cada processo:
Estado do processo;
Contador de programa;
Registradores da CPU;
Informação de escalonamento da CPU;
Informação de gerenciamento de memória;
Informação de contabilidade;
Informação de status de E/S;
20.
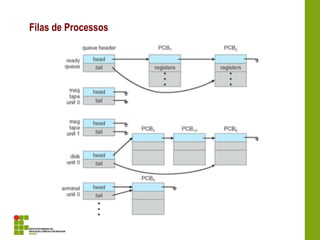
Filas de Processos
Fila de job:
Conjunto de todos os processos no sistema;
Fila de pronto:
Conjunto de todos os processos residindo na memória
principal, prontos e esperando para execução;
Filas de dispositivo:
Conjunto de processos esperando por um dispositivo de E/S;
Processos migram entre as diversas filas;
Escalonador
Responsável pelaordenação das filas de processos;
Tipos de escalonadores:
Longo prazo:
Seleciona quais processos devem ser trazidos para a fila
de pronto;
É invocado com pouca frequência (segundos, minutos);
Controla o grau de multiprogramação;
Curto prazo:
Seleciona qual processo deve ser executado em seguida
e aloca CPU;
É invocado muito frequentemente (milissegundos);
23.
Atividades Laboratório –Simulador Sosim (Pág 79)
Criação de Processos;
Tipos de Processos;
PCB;
Estatísticas;
Log de execução;
Suspensão e Eliminação de Processos;
24.
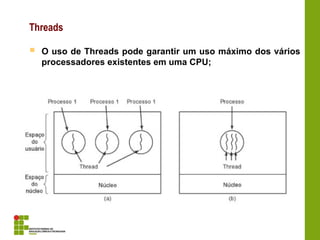
Threads
É umalinha de execução de código que executa em paralelo
com outras linhas do mesmo processo, compartilhando seu
espaço de memória;
Na prática uma thread é equivalente a um mini-processo
dentro de um processo;
Isto permite que várias ações sejam executadas em paralelo
por um mesmo processo.
25.
Threads
Em umprograma muitas vezes é necessário executar mais
de uma atividade ao mesmo tempo;
Ex.: aguardar a entrada de dados do usuário e reproduzir um
som enquanto aguarda;
Uma thread é muito mais leve que um processo comum;
Ganho de performance na criação e destruição de threads se
comparada a processos (10 a 100x);
Quando uma aplicação tem atividade I/O bound e CPU
bound as threads podem acelerar a execução, pois não
concorrerão por recurso;
26.
Threads
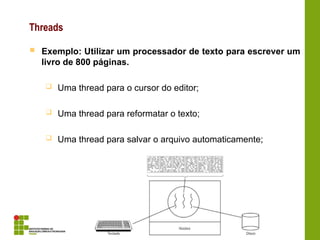
Exemplo: Utilizarum processador de texto para escrever um
livro de 800 páginas.
Uma thread para o cursor do editor;
Uma thread para reformatar o texto;
Uma thread para salvar o arquivo automaticamente;
27.
Threads
Se oexemplo anterior tivesse apenas uma thread, então,
sempre que um backup de disco se iniciasse, os comandos
do teclado e do mouse seriam ignorados enquanto o backup
não terminasse;
O usuário certamente perceberia isso como uma queda de
desempenho;
Deve estar claro que três processos separados não
funcionariam no exemplo dado, pois todos os três threads
precisam operar sobre o documento;
Outro exemplo: planilha eletrônica com cálculos em certos
campos;
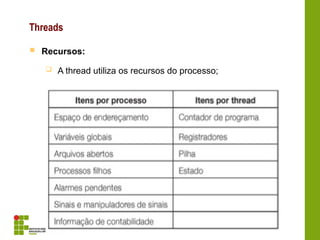
Threads
Recursos:
Contadorde Programa – Posição da sequência da thread;
Registradores – Área que irá armazenar as threads;
Pilha – Instruções que serão executadas;
Estado – O estado da thread (novo, espera, pronto, ...)
32.
Threads
Comandos comuns:
Create() – Cria uma nova thread;
Exit() – Encerra uma thread liberando os recursos alocados
para esta;
Join() – Aguarda que uma outra thread termine para
continuar a execução, útil quando uma thread necessita de
dados de outra;
Yield() ou Sleep() – Libera a CPU e volta para fila de pronto,
comum quando a atividade da thread não é necessária no
momento;
33.
Threads
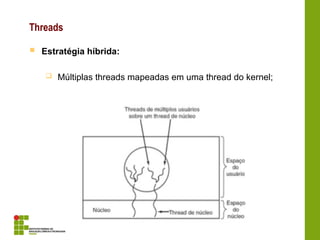
Implementação:
Podemser implementadas em:
nível de usuário
em nível de kernel
forma híbrida;
As alternativas são válidas e tem vantagens e desvantagens;
34.
Threads
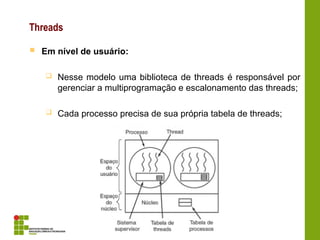
Em nívelde usuário:
Nesse modelo uma biblioteca de threads é responsável por
gerenciar a multiprogramação e escalonamento das threads;
Cada processo precisa de sua própria tabela de threads;
35.
Threads
Em nívelde usuário:
Nesse modelo a mudança de uma thread para outra é rápida
pois não envolve necessariamente uma sytem call;
A troca entre esses tipos de threads é da ordem de
nanosegundos;
Permitem que cada processo use o algoritmo de
escalonamento que achar mais adequado;
São mais econômicas quanto ao espaço de memória (no
kernel) necessário para sua implementação;
36.
Threads
Em nívelde usuário - desvantagens:
Uma chamada bloqueante pode bloquear todo o processo e
não apenas a thread em questão;
Uma page_fault pode ocorrer o que causará uma system call
e também parará todo o processo;
Dentro de um processo não há como o escalonador contar o
tempo de uso da CPU para retirar uma thread de execução a
não ser que esta execute yield;
A maioria dos processos de usuário que usam threads o
fazem pela característica I/O bound o que implica que
bloquearão o sistema sempre que fizerem I/O;
37.
Threads
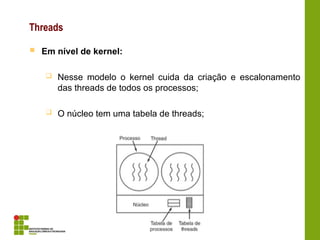
Em nívelde kernel:
Nesse modelo o kernel cuida da criação e escalonamento
das threads de todos os processos;
O núcleo tem uma tabela de threads;
38.
Threads
Em nívelde kernel:
As chamadas de criação e fim de threads são gerenciadas
pelo kernel;
Isso significa um overhead para essas operações;
Este modelo de implementação resolve um problema grave
das threads em nível de usuário:
Threads que bloqueiam um processo inteiro;
Uma estratégia para diminuir o overhead é reciclar threads;
Comunicação entre Processos(IPC – Interprocess Comunication)
Os SO’s hoje em dia são multitarefa;
Alguns processos precisam cooperar para cumprir seus
objetivos;
Sugestões de implementação?
Exemplos:
Um aplicativo imprimindo um documento.
41.
Comunicação entre Processos(IPC – Interprocess Comunication)
Problemas:
Como um processo passa a informação para outro?
Como garantir que dois processos não entrem em
conflito?
Ex.: Reservar o mesmo lugar no avião
Qual a sequência adequada quando existirem
dependências?
Ex.: P1 produz os dados e P2 os imprime. P2 deve
esperar até que P1 produza os dados.
42.
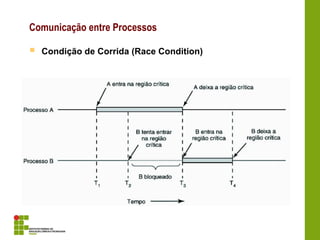
Comunicação entre Processos
Condição de Corrida (Race Condition)
Condição em que dois processos leem e escrevem um dado
compartilhado e o resultado final depende da ordem em que
os processos são executados;
Lembra-se que em um sistema multitarefa um processo pode
ser retirado da execução para pronto a qualquer momento;
Essa condições são muito difíceis de debuggar, encontrar
falhas, que podem ocorrer dependendo de fatores externos;
43.
Comunicação entre Processos
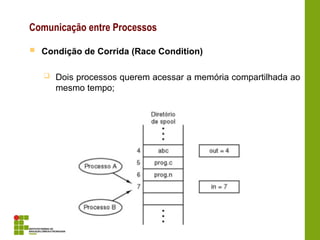
Condição de Corrida (Race Condition)
Dois processos querem acessar a memória compartilhada ao
mesmo tempo;
44.
Comunicação entre Processos
Condição de Corrida (Race Condition)
Uma solução para o problema da condição de corrida é
evitar que mais de um processo leia/escreva ao mesmo
tempo;
Essa estratégia é chamada exclusão mútua (mutex);
É dever do programador, identificar estas situações e
proteger seu código nestas situações;
45.
Comunicação entre Processos
Condição de Corrida (Race Condition)
Para que a solução seja implementada pelo SO, 4 condições
são necessárias:
Dois processos não podem estar em sua região crítica
simultaneamente;
A solução deve funcionar para qualquer número de CPUs
e qualquer velocidade;
Nenhum processo fora da região crítica pode bloquear
outros processos;
Nenhum processo deve esperar eternamente para entrar
em sua região crítica;
Comunicação entre Processos
Algumas soluções possíveis:
Desabilitar interrupções;
Variáveis de trava (lock);
Chaveamento obrigatório;
Solução de Peterson;
Dormir e acordar;
Semáforos;
Mutex;
Monitores;
48.
Comunicação entre Processos
Desabilitar interrupções:
Ao entrar na região crítica ficam desabilitadas as
interrupções;
Evita que ocorra troca de contexto por tempo;
Em um sistema multiprocessado pode ser complexo ou
impossível desabilitar a interrupção em todos os
processadores;
Entregar o controle das interrupções ao usuário pode ser
perigoso se o processo não habilitar novamente estas
interrupções;
49.
Comunicação entre Processos
Variáveis de trava (lock):
Uma única variável lock indica quando há algum processo
em uma região crítica;
Se lock == 0 não há processo na região crítica;
Se lock == 1 há processo na região crítica;
A ideia é: se o seu processo quer entrar na região crítica ele
deve ler lock e só poderá entrar quando lock == 0;
Quando ele entrar deve fazer lock == 1;
50.
Comunicação entre Processos
Chaveamento obrigatório:
Alterna entre dois processos;
A variável turn indica qual processo tem direito a entrar na
região crítica;
Viola a condição que um processo em região não crítica
bloqueia um processo;
51.
Comunicação entre Processos
Solução de Peterson:
Define duas funções enter_region e leave_region;
Usa um vetor de interessados em entrar na região crítica;
Usa uma variável turn para definir quem é a vez para usar a
região crítica;
52.
Comunicação entre Processos
Dormir e acordar:
As soluções anteriores são corretas mas empregam a
”espera ocupada” também chamada ”espera ociosa”;
Se um processo não consegue entrar na região crítica ele
fica preso em um loop consumido tempo de CPU;
Pode gerar um problema de inversão de prioridades;
Para resolver este problema podemos usar chamadas do SO
sleep e wakeup;
53.
Comunicação entre Processos
Dormir e acordar:
Sleep() e Wakeup():
A diferença mais importante desta estratégia para as
outras é que estas permitem que o SO bloqueie o
processo em sleep;
Assim o processo não consumirá CPU enquanto espera
para entrar em sua região crítica;
54.
Comunicação entre Processos
Problema do Produtor Consumidor:
Paradigma para processos em cooperação, processo
produtor produz informações que são consumidas por um
processo consumidor;
Quando o produtor quer colocar um novo item no buffer, mas
ele já está cheio, a solução é o produtor dormir e só
despertá-lo quando o consumidor remover um ou mais itens
do buffer;
Se o consumidor quiser remover um item do buffer e
perceber que está vazio, ele dormirá até que o produtor
ponha algo no buffer;
55.
Comunicação entre Processos
Semáforos:
Um semáforo é uma estratégia que permite que 2 ou mais
processos se alternem no uso de um recurso compartilhado;
Corrigindo o problema do sinal wakeup perdido, os
semáforos tem um contador interno para os sleep e wakeup;
Para manter a clareza nos semáforos as instruções são
chamadas down e up;
56.
Comunicação entre Processos
Mutex:
São tipos especiais de semáforos que tem apenas uma
variável binária, permitindo que apenas 1 processo acesse a
região crítica;
É equivalente a um semáforo iniciado em 1;
A implementação é mais simples e mais rápida;
Muito usado para garantir exclusão mútua a uma variável
compartilhada;
57.
Comunicação entre Processos
Monitores:
A última estratégia para o problema da condição de corrida;
É um artificio de algumas linguagens de programação;
Permite que se defina um conjunto de métodos e
propriedades dentro de um pacote ou módulo;
O importante aqui é que Somente 1 processo pode estar
ativo em um monitor por vez;
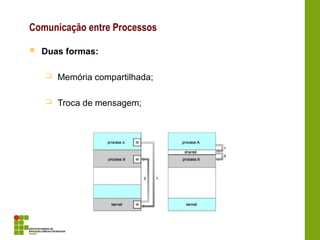
Comunicação entre Processos
Troca de mensagens:
Sistema de mensagem:
Processos se comunicam entre si sem lançar mão de
variáveis compartilhadas;
A comunicação utiliza duas funções:
Send (destino, mensagem);
Receive (origem, mensagem);
Se P e Q quiserem se comunicar, eles precisam:
Estabelecer um link de comunicação entre eles;
Trocar mensagens por meio de send/receive;
60.
Escalonamento
Mais importanteem sistemas multiprogramados;
Trata da ordem em que processos são executados na CPU;
Trata da prioridade entre estes processos;
Há vários tipos:
Batch;
Interativo;
Tempo Real;
61.
Escalonamento – Tipos
Batch:
Grande tempo alocado a cada processo;
Um processo não interromperá outro processo;
Mudança comumente ocorre por bloqueio do processo;
62.
Iterativo:
Grandealternância entre processos;
Mudança rápida;
Muitas trocas de contexto por segundo;
Escalonamento – Tipos
63.
Tempo Real:
Exigem que o sistema tenha um tempo de resposta definido;
A perda de um determinado limite de tempo de execução
pode ser catastrófica;
Dividido em Soft Real Time e Hard Real Time;
Escalonamento – Tipos
64.
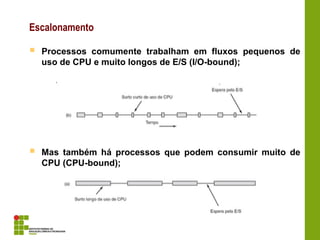
Escalonamento
Processos comumentetrabalham em fluxos pequenos de
uso de CPU e muito longos de E/S (I/O-bound);
Mas também há processos que podem consumir muito de
CPU (CPU-bound);
65.
Escalonamento – Objetivos
Todos os sistemas:
Justiça – dar a cada processo uma porção justa da CPU;
Aplicação da política – verificar se a política estabelecida é
cumprida;
Equilíbrio – manter ocupadas todas as partes do sistema;
Sistemas em lote(batch):
Vazão (throughput) – maximizar o número de tarefas por
hora;
Tempo de retorno – minimizar o tempo entre a submissão e o
término;
Utilização de CPU – manter a CPU ocupada o tempo todo;
66.
Escalonamento – Objetivos
Sistemas interativos:
Tempo de resposta – responder rapidamente às requisições;
Proporcionalidade – satisfazer às expectativas dos usuários;
Sistemas de tempo real:
Cumprimento dos prazos – evitar a perda de dados;
Previsibilidade – evitar a degradação da qualidade em
sistemas multimídia;
Escalonamento
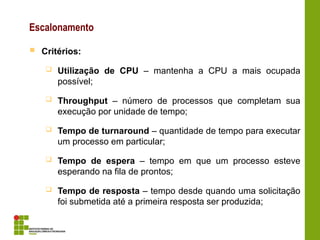
Critérios:
Utilizaçãode CPU – mantenha a CPU a mais ocupada
possível;
Throughput – número de processos que completam sua
execução por unidade de tempo;
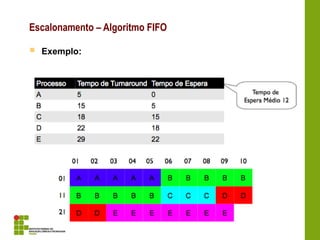
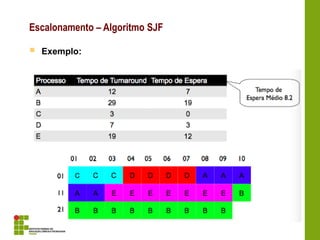
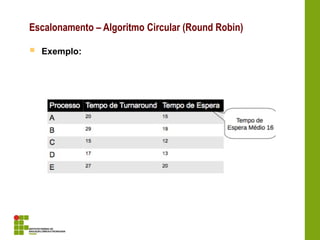
Tempo de turnaround – quantidade de tempo para executar
um processo em particular;
Tempo de espera – tempo em que um processo esteve
esperando na fila de prontos;
Tempo de resposta – tempo desde quando uma solicitação
foi submetida até a primeira resposta ser produzida;
70.
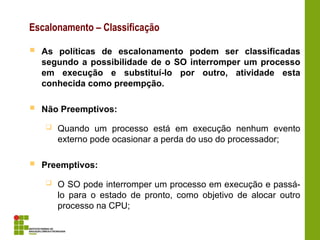
Escalonamento – Classificação
As políticas de escalonamento podem ser classificadas
segundo a possibilidade de o SO interromper um processo
em execução e substituí-lo por outro, atividade esta
conhecida como preempção.
Não Preemptivos:
Quando um processo está em execução nenhum evento
externo pode ocasionar a perda do uso do processador;
Preemptivos:
O SO pode interromper um processo em execução e passá-
lo para o estado de pronto, como objetivo de alocar outro
processo na CPU;
71.
Escalonamento – Algoritmos
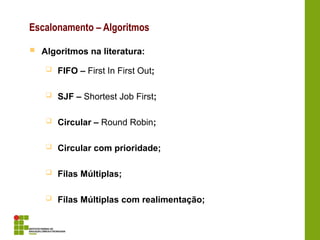
Algoritmos na literatura:
FIFO – First In First Out;
SJF – Shortest Job First;
Circular – Round Robin;
Circular com prioridade;
Filas Múltiplas;
Filas Múltiplas com realimentação;
72.
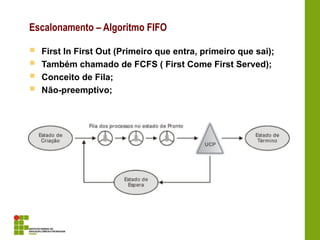
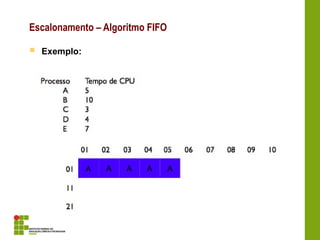
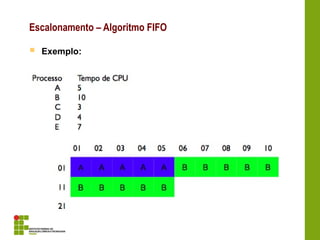
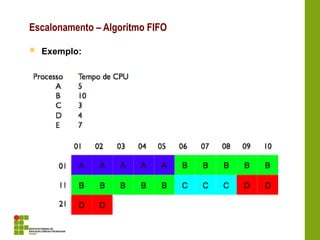
Escalonamento – AlgoritmoFIFO
First In First Out (Primeiro que entra, primeiro que sai);
Também chamado de FCFS ( First Come First Served);
Conceito de Fila;
Não-preemptivo;
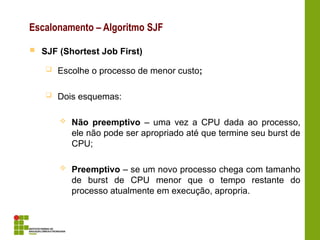
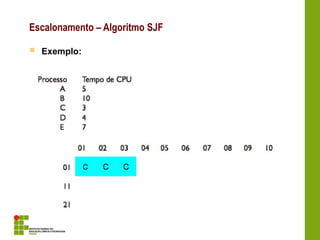
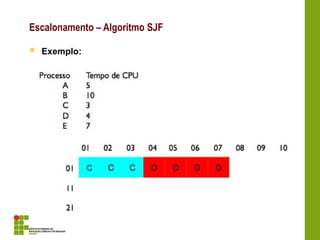
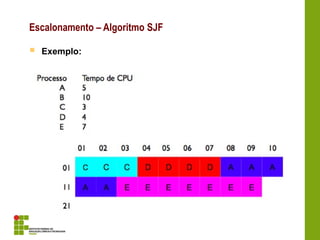
SJF (ShortestJob First)
Escolhe o processo de menor custo;
Dois esquemas:
Não preemptivo – uma vez a CPU dada ao processo,
ele não pode ser apropriado até que termine seu burst de
CPU;
Preemptivo – se um novo processo chega com tamanho
de burst de CPU menor que o tempo restante do
processo atualmente em execução, apropria.
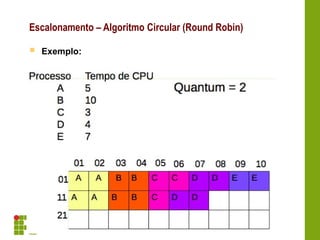
Escalonamento – Algoritmo SJF
Preemptivo;
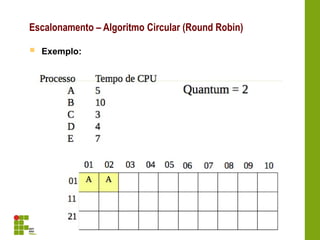
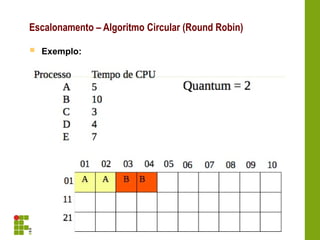
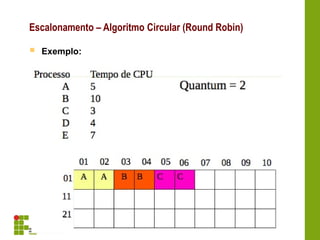
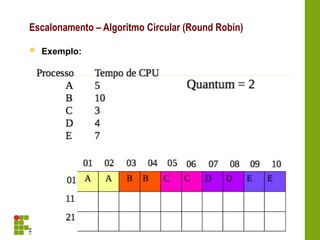
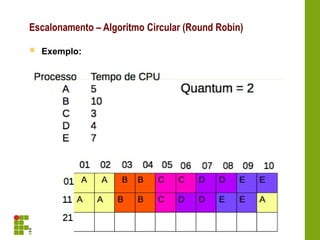
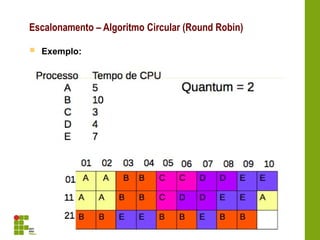
Acada processo é dado um tempo fixo de CPU que este
pode usar;
Expirado esse tempo o processo é retirado da CPU e
colocado no fim da fila de pronto;
Na prática há uma alternância circular entre os processos
em estado pronto;
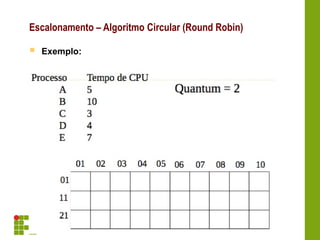
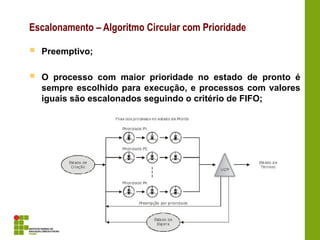
Escalonamento – Algoritmo Circular (Round Robin)
Preemptivo;
Oprocesso com maior prioridade no estado de pronto é
sempre escolhido para execução, e processos com valores
iguais são escalonados seguindo o critério de FIFO;
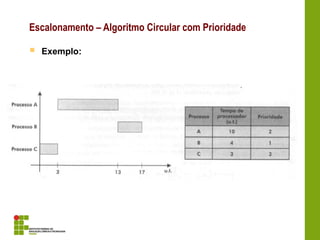
Escalonamento – Algoritmo Circular com Prioridade
Existem diversasfilas de processos no estado de pronto,
cada qual com uma prioridade específica;
Os processo são associados às filas em função de
características próprias, como importância para a aplicação,
tipo de processamento ou área de memória necessária;
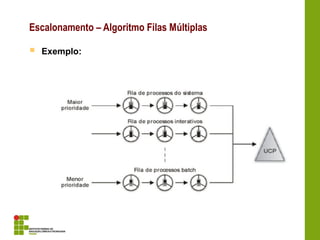
Escalonamento – Algoritmo Filas Múltiplas
Atividade Laboratório –Simulador Sosim (Pág 143)
Escalonamento Circular;
Escalonamento Circular com Prioridades Estatísticas I;
Escalonamento Circular com Prioridades Estatísticas II;
Escalonamento Circular com Prioridades Dinâmicas;
99.
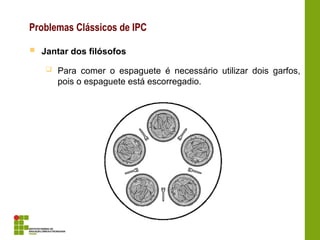
Problemas Clássicos deIPC
Jantar dos filósofos
Para comer o espaguete é necessário utilizar dois garfos,
pois o espaguete está escorregadio.
100.
Problemas Clássicos deIPC
Leitores e escritores
Se um processo(P1-Escritor) estiver atualizando uma base
de dados, nenhum outro processo pode ter acesso ao banco
de dados, nem mesmo os leitores(P2-Leitor).
Como programar os leitores e os escritores?
101.
Problemas Clássicos deIPC
Barbeiro
Um barbeiro recebe clientes para cortar cabelo. Na barbearia
há uma cadeira de barbeiro e apenas cinco cadeiras para
clientes esperarem.