Baixado 79 vezes

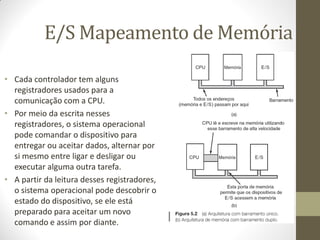
![ExemploDispositivosdeBlocoeCaracteres
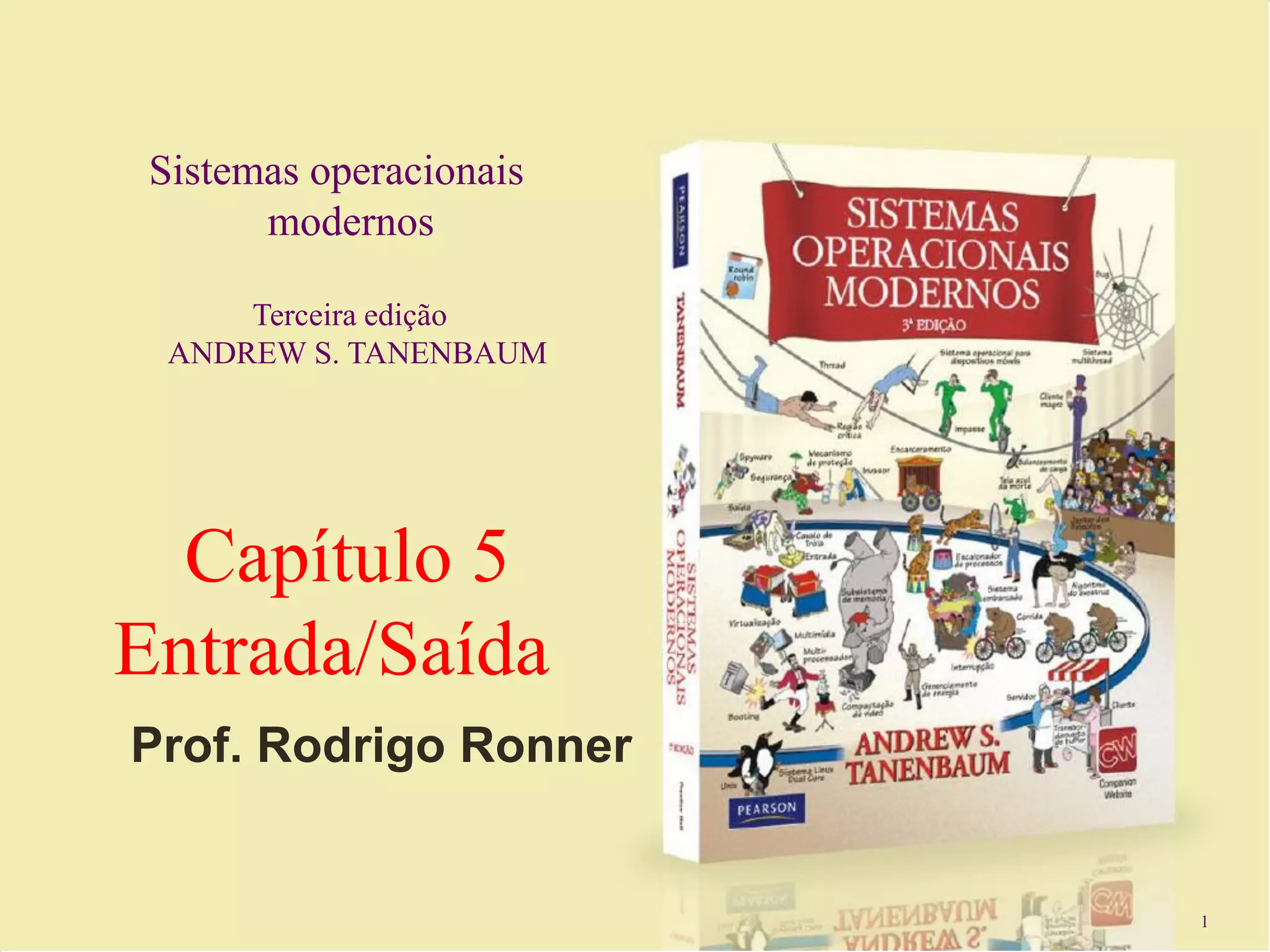
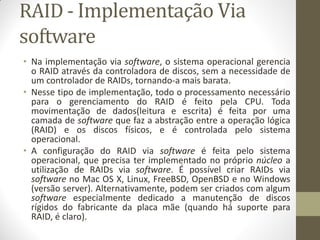
[ronner@localhost Documents]$ cat /proc/devices
Character devices:
1 mem (Acesso Memória Física)
2 /dev/vc/0 (Console Virtual)
3 tty (Dispositivos do Tipo Terminais Estilo BSD (TTY)
4 /dev/ptmx (Multiplexador para dispositivos do tipo estilo AT&T )
5 vcs (Dispositivos de captura de console virtual)
6 misc (Mouses não seriais)
7 input (Núcleo de entrada – Normalmente contém um mouse)
8 sound (Dispositivo de Áudio)
9 usb (Dispositivo USB)
10 alsa (Advanced Linux Sound Driver (Driver Avançado de som linux)
Block devices:
1 fd Unidade de disco flexível
2 ide0 Canal IDE Primário
3 ide0 Canal IDE Secundário
4 sda1 Canal Sata](https://image.slidesharecdn.com/entradaesaidacap05iiiunidade-130718070020-phpapp01/85/Entrada-e-saida-cap-05-iii-unidade-7-320.jpg)
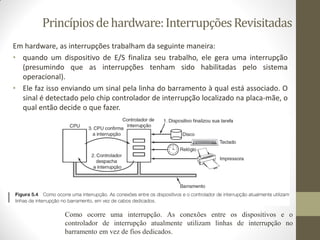

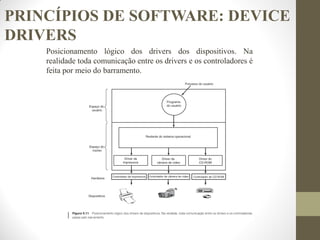

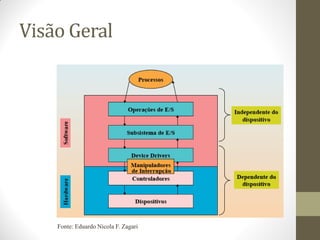
1) O documento discute os princípios de hardware e software relacionados a sistemas de entrada e saída (E/S). 2) É destacada a importância de estruturar a interface E/S em camadas para esconder detalhes dos dispositivos e prover uma interface simples. 3) São descritos conceitos como dispositivos de blocos versus caracteres, mapeamento de memória, interrupções, acesso direto à memória e drivers de dispositivo.

















































![Dispositivos [Entrada E SaíDa]](https://cdn.slidesharecdn.com/ss_thumbnails/dispositivos-entrada-e-sada-1208487451781708-8-thumbnail.jpg?width=640&height=640&fit=bounds)































