Baixado 298 vezes

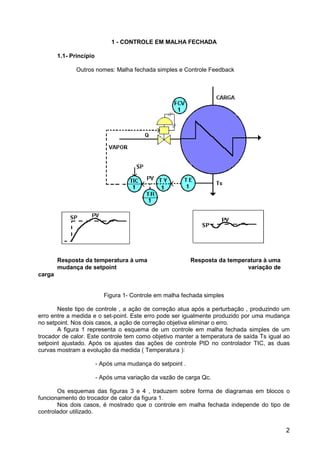
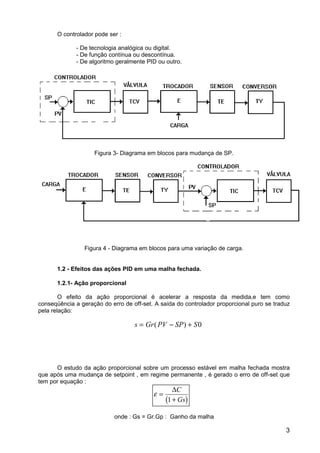

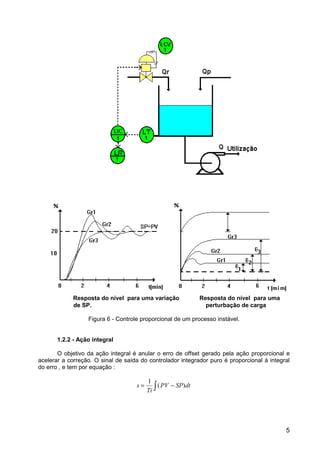


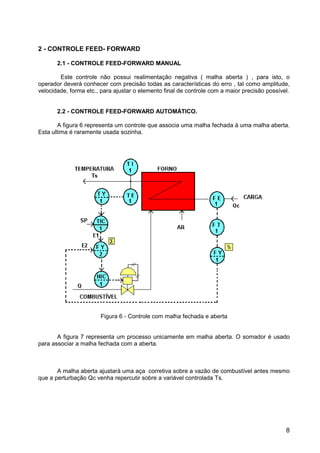
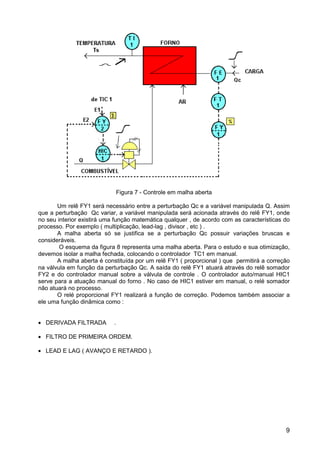
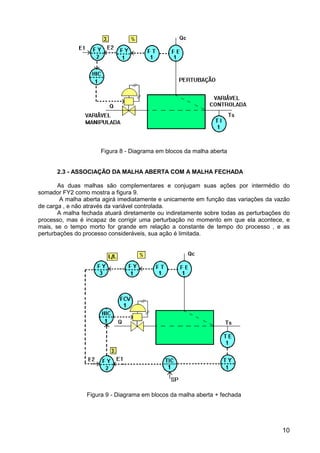

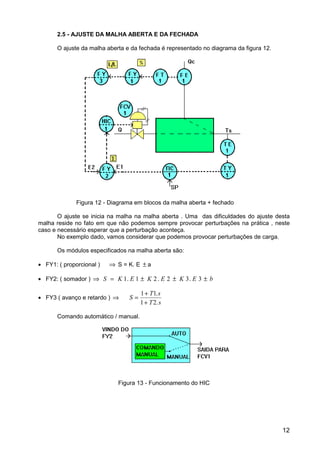









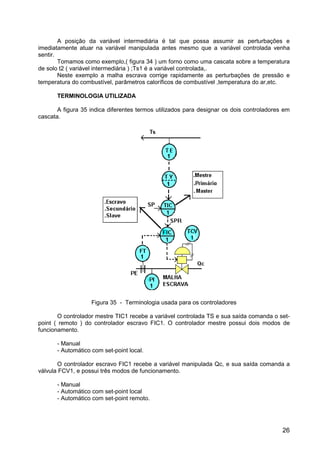









O documento descreve os princípios e aplicações de controles em malha fechada e malha aberta. Explica como o controle em malha fechada mantém a variável controlada igual ao setpoint através de um feedback do erro. Já o controle em malha aberta age antecipadamente para corrigir perturbações com base em um modelo matemático do processo. O texto também detalha o ajuste dos parâmetros destes controles em um exemplo prático de controle de temperatura em um trocador de calor.



![Resolução do capítulo 1 brunetti[1]](https://cdn.slidesharecdn.com/ss_thumbnails/resoluodocaptulo1-brunetti1-140313024243-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
















































































