Controle de posição de uma junta robótica
•
0 gostou•231 visualizações

Lista de exercícios de robótica (Prominp 2007).

Recomendados
Mais conteúdo relacionado
Destaque
Destaque (13)
Semelhante a Controle de posição de uma junta robótica
Semelhante a Controle de posição de uma junta robótica (20)
Mais de Jim Naturesa
Mais de Jim Naturesa (20)
Último
Último (20)
Controle de posição de uma junta robótica
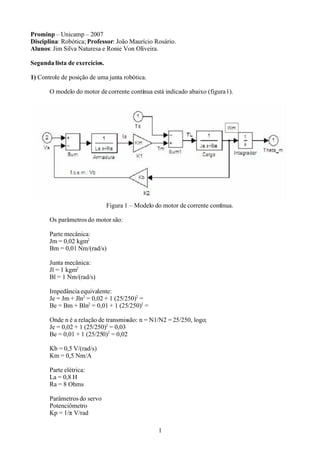
- 1. Prominp – Unicamp – 2007 Disciplina: Robótica; Professor: João Maurício Rosário. Alunos: Jim Silva Naturesa e Ronie Von Oliveira. Segunda lista de exercícios. 1) Controle de posição de uma junta robótica. O modelo do motor de corrente contínua está indicado abaixo (figura 1). Figura 1 – Modelo do motor de corrente contínua. Os parâmetros do motor são: Parte mecânica: Jm = 0,02 kgm2 Bm = 0,01 Nm/(rad/s) Junta mecânica: Jl = 1 kgm2 Bl = 1 Nm/(rad/s) Impedância equivalente: Je = Jm + Jln2 = 0,02 + 1 (25/250)2 = Be = Bm + Bln2 = 0,01 + 1 (25/250)2 = Onde n é a relação de transmissão: n = N1/N2 = 25/250, logo; Je = 0,02 + 1 (25/250)2 = 0,03 Be = 0,01 + 1 (25/250)2 = 0,02 Kb = 0,5 V/(rad/s) Km = 0,5 Nm/A Parte elétrica: La = 0,8 H Ra = 8 Ohms Parâmetros do servo Potenciômetro Kp = 1/π V/rad 1
- 2. Ganho do controlador K = 10 O modelo completo da junta está indicado na figura 2. Figura 2 – Modelo completo da junta. Para a função impulso temos a seguinte saída (figura 3). Figura 3 – Reposta a função impulso para K =10. Se alterarmos o ganho do controlador (K) temos as seguintes respostas. Para K = 1 o sistema torna-se instável - veja figura 4. 2
- 3. Figura 4 – Reposta a função impulso para K =1. Para K = 100 temos a seguinte resposta – veja figura 5. O sistema apresenta uma oscilação aperiódica amortecida durante os primeiros 10 segundos, estabilizando-se em seguida. Essa resposta não é satisfatória, pois a ferramenta do robô apresentaria uma oscilação comprometendo sua função. Figura 5 – Resposta a função impulso para K = 100. 2) Gerador de trajetória 3
- 4. Nessa segunda parte vamos substituir a função impulso por um gerador de trajetória. Para gerar a trajetória do robô foi utilizada a função Signal Builder do Matlab. A forma do sinal de entrada está indicado na figura 6. Figura 6 – Sinal de entrada. O modelo completo do sistema está apresentado na figura 7. Os ganhos são G1 = 30 e G2 = 50. A figura 8 mostra os resultados obtidos. Figura 7 – Modelo completo. 4
- 5. A primeira curva (de cima para baixo) mostra a trajetória da junta 1 ou teta1; a segunda curva mostra a trajetória da junta 2 ou teta 2. A terceira curva apresenta a saída do integrador e a quarta e última curva apresenta o sinal de entrada. Figura 8 – Resultados obtidos para G1 = 30 e G2 = 50. Alterando os ganhos para G1 = 60 e G2 = 80 temos os resultados apresentados na figura 9. Figura 9 – Resultados obtidos para G1 = 50 e G2 = 80. 5
- 6. Os resultado diferem muito pouco com relação à simulação anterior. Referências Craig, J. Introduction to Robotics – Mechanics and Control. Pearson - Prentice Hall. 1989. Rosário, J. Princípios de Mecatrônica. Editora Pearson. 2005. Spong, M. & Vidyasagar, M. Robot Dynamics and Control. John Wiley & Sons. 1989. 6