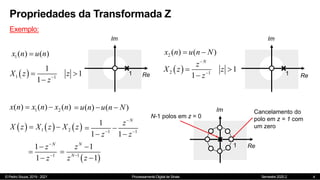
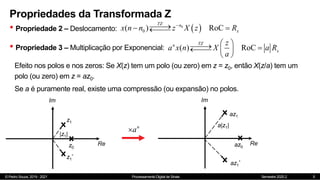
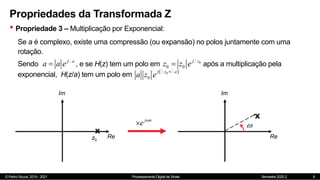
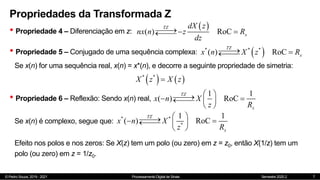
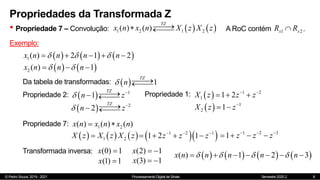
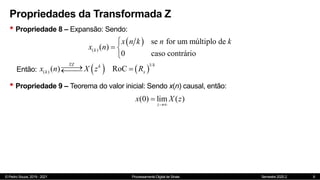
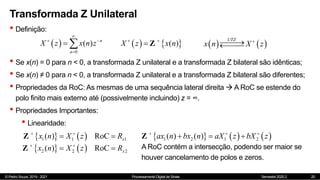
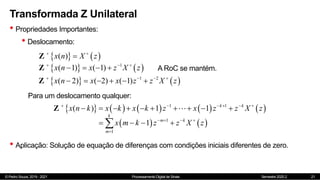
1) A aula apresenta as principais propriedades da Transformada Z, como linearidade, deslocamento, multiplicação por exponencial e diferenciação.
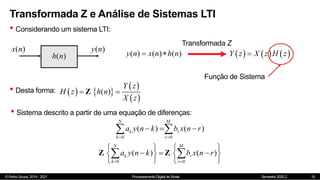
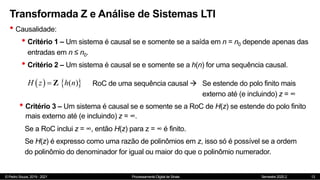
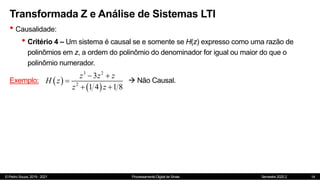
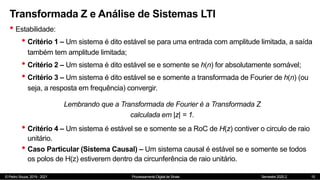
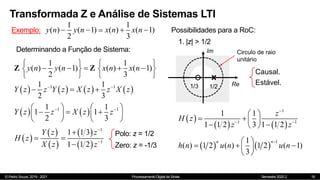
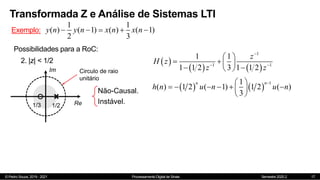
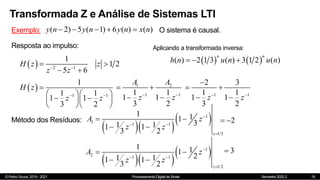
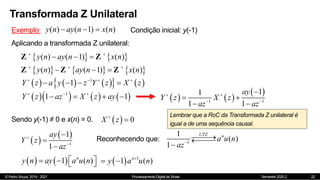
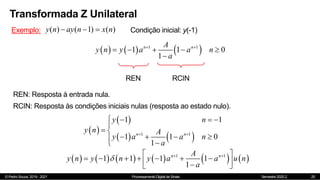
2) É definido o conceito de função de sistema e mostrado como a Transformada Z pode ser usada para analisar sistemas lineares invariantes no tempo.
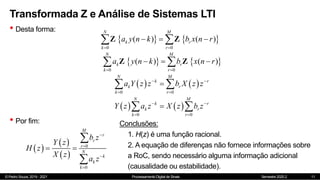
3) As propriedades da Transformada Z permitem representar equações de diferenças em termos de funções racionais, o que facilita a análise de sistemas no domínio Z.
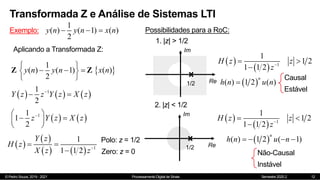
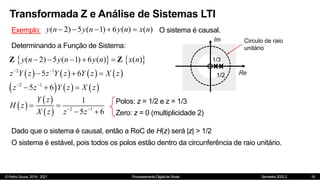




![[Pds] Transformada Z](https://cdn.slidesharecdn.com/ss_thumbnails/pdstransformadaz-180606032240-thumbnail.jpg?width=640&height=640&fit=bounds)






























