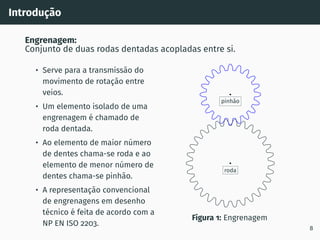
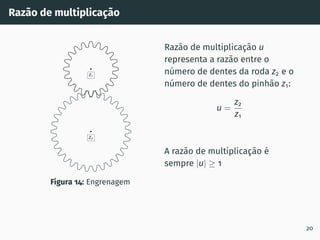
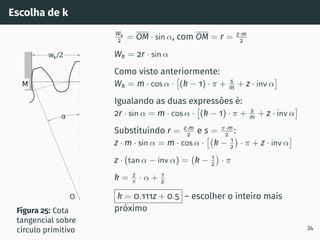
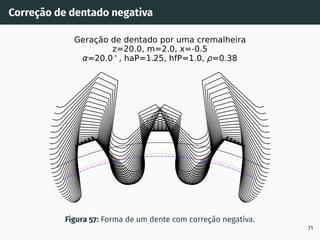
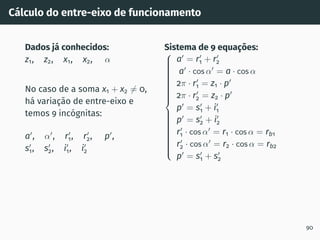
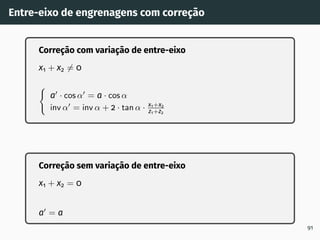
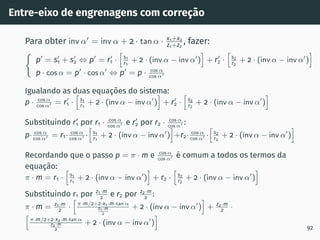
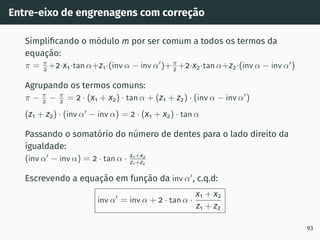
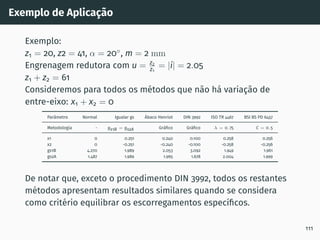
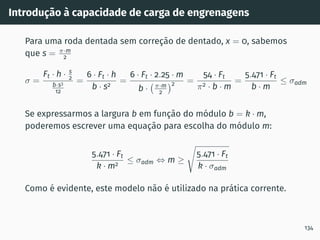
1. O documento apresenta os conceitos fundamentais de engrenagens, incluindo a classificação, perfis de dentado e conceitos como círculo primitivo, passo e módulo.
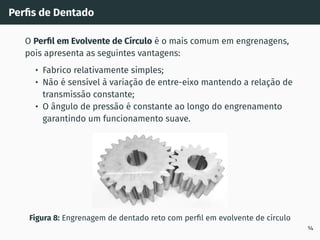
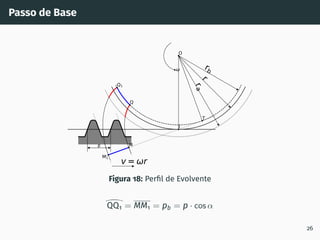
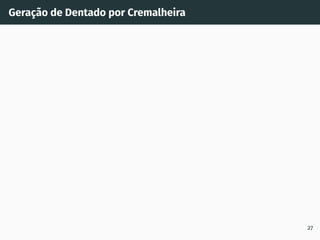
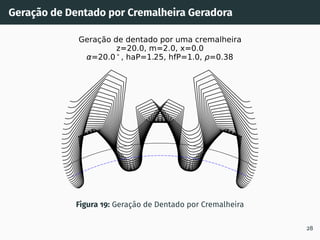
2. São descritos os processos de geração de dentado por cremalheira, incluindo a evolvente de círculo e o ângulo de incidência.
3. São apresentadas normas e referências técnicas relevantes para o projeto e análise de engrenagens.


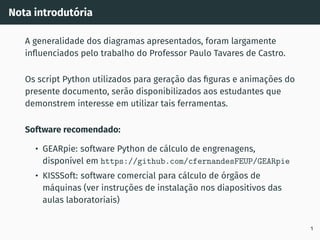
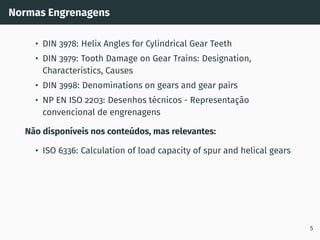
![Classificação das Engrenagens
(a) Paralelos (b) Esquerda (c) Esquerda
(d) Concorrentes (e) Esquerda
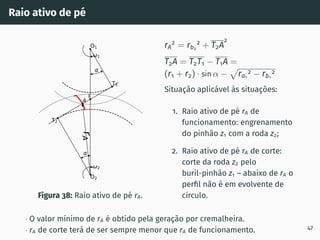
Figura 2: Classificação quanto à Posição dos Eixos [1].
9](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-11-320.jpg)
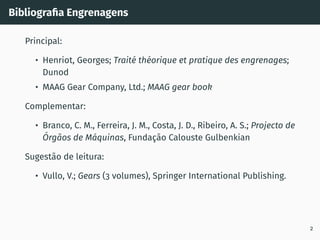
![Classificação das Engrenagens
(a) Recto (b) Helicoidal
Figura 3: Classificação quanto ao Tipo de Dentado [1].
10](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-12-320.jpg)
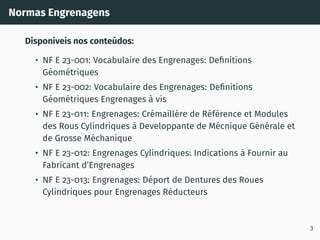
![Classificação das Engrenagens
(a) Interior (b) Exterior
Figura 4: Classificação quanto à Posição do Centro Instantâneo de Rotação
[1].
11](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-13-320.jpg)
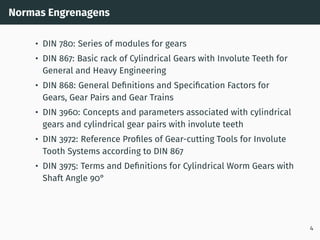
![Perfis de Dentado
Perfil em arco circular
• Caixas de velocidades de
muito baixa rotação
Figura 6: Engrenagem com perfil em
arco circular (Wildhaber-Novikov) [2]
Perfil S
• Apresentam algumas
vantagens em engrenagens
poliméricas
Figura 7: Engrenagem com perfil S [3] 13](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-15-320.jpg)
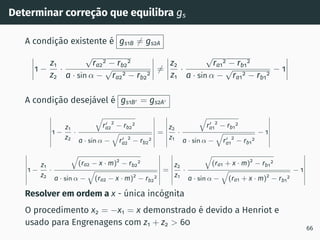
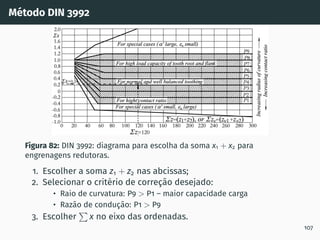
![Correção de dentado - método gráfico z1 + z2 ≥ 60
Figura 53: Solução gráfica do algoritmo
gs1B′ = gs2A′ [4, 5].
1. Escolher z1 nas
abcissas;
2. Interceptar z1 com a
razão de transmissão
u = z2
z1
(à direita de
ABA’);
3. Escolher x1 nas
ordenadas;
4. x2 = −x1
x1 + x2 = 0
67](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-79-320.jpg)
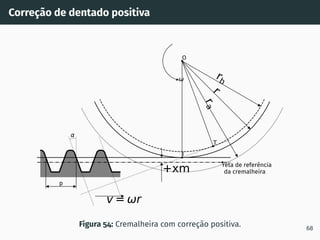
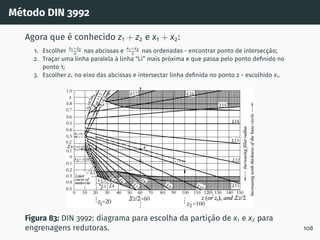
![Correção de dentado - método gráfico z1 + z2 60
Figura 58: Solução gráfica do algoritmo
gs1B′ = gs2A′ [4, 5].
1. Escolher z1 nas
abcissas;
2. Interceptar z1 com
z1 + z2 = 60;
3. Escolher x1 nas
ordenadas
4. Interceptar z1 com a
razão de transmissão
u = z2
z1
(à esquerda de
ABA’);
5. Escolher x2 nas
ordenadas;
x1 + x2 ̸= 0 – existe
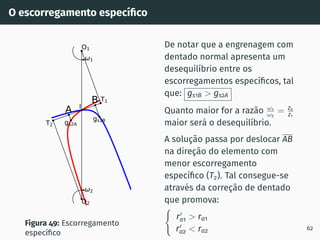
variação de entre-eixo 72](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-84-320.jpg)
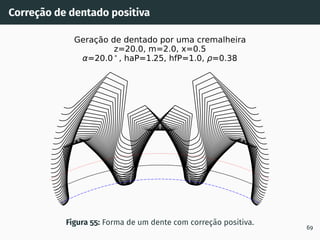
![Interferência de corte
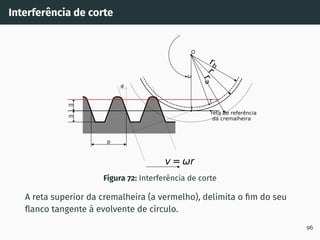
Figura 71: Interferência de corte [5].
O corte da roda dentada acontece mesmo abaixo do raio de base.
A interferência de corte (em inglês “undercut”) surge quando o
número de dentes da roda dentada é inferior a z′
(ver adiante).
95](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-110-320.jpg)
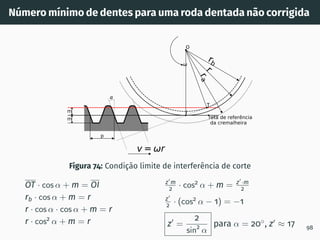
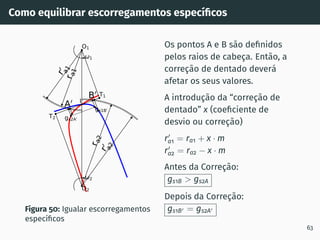
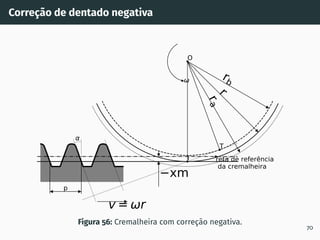
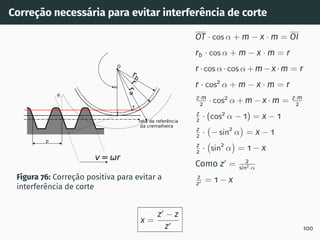
![Número mı́nimo de dentes para uma roda dentada não corrigida
Figura 75: Método gráfico para
determinar o número mı́nimo de
dentes para uma roda dentada não
corrigida em função do ângulo de
pressão da cremalheira de corte [5].
Se for admissı́vel alguma
interferência e um nı́vel de ruı́do
mais elevado, principalmente a
baixas velocidades, pode-se
usar o número mı́nimo de
dentes correspondente à curva
prática. No entanto é expectável
uma vida útil mais curta.
99](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-114-320.jpg)
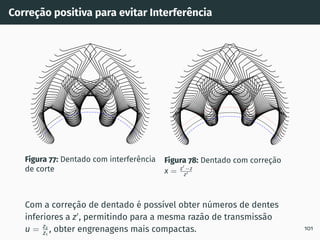
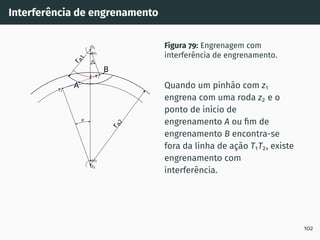
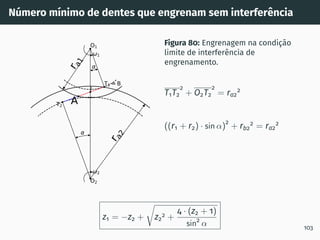
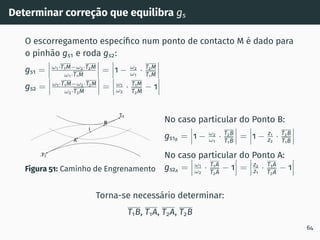
![Número mı́nimo de dentes z1 em função de z2
Figura 81: Número mı́nimo de dentes do pinhão z1 em função do número de
dentes da roda z2 (ha = m e entre-eixo de corte) [5]. 104](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-119-320.jpg)
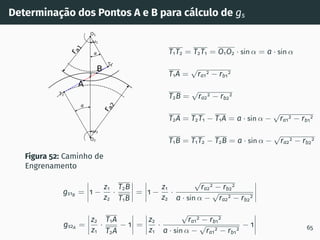
![Principais modificações de micro-geometria
Figura 86: Tip and root relief Figura 87: End relief
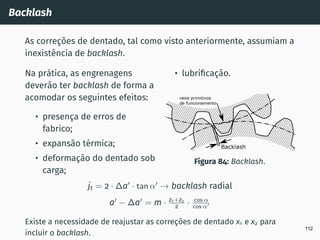
O alı́vio da cabeça (tip relief) e o alı́vio do pé do dente (root relief)
são modificações intencionais do perfil do dente. Uma pequena
quantidade de material é removido com a finalidade de suavizar o
inı́cio do engrenamento [5]. O end relief evita o contacto nos bordos
das rodas dentadas.
As modificações micro-geométricas do tipo relief podem ser:
lineares, arcos, progressivas... (Ver ISO 21771)
114](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-130-320.jpg)
![Principais modificações de micro-geometria
Figura 88: Profile crowning Figura 89: Lead crowning
Na prática, as engrenagens possuem desvios e erros de
fabrico/montagem.
Para reduzir tanto quanto possı́vel os efeitos destes desvios e erros,
tipicamente usam-se modificações do perfil nas direção do perfil
(profile crowning) e longitudinal (lead crowning) [5].
Existem outras modificações que permitem modificação do ângulo
de pressão e hélice (helicoidais).
115](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-131-320.jpg)

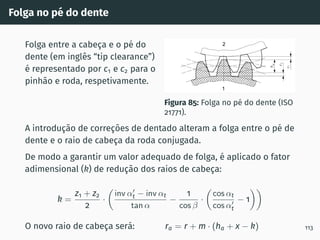
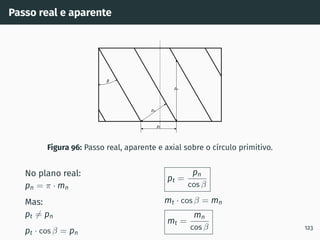
![Elementos geométricos no plano real
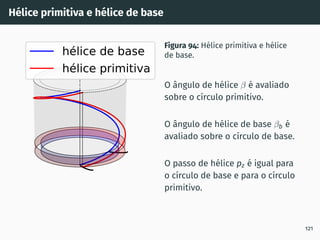
Figura 91: Ângulo de pressão sobre o
plano real ou normal -
perpendicular ao dentado [5].
Elementos reais:
medem-se num plano
perpendicular ao dentado e
representam-se pelo ı́ndice n
αn ângulo de pressão real
mn módulo real
pn passo real
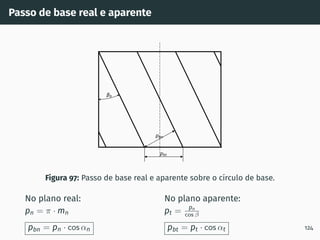
pbn passo de base real
pn = π · mn
pbn = pn · cos αn
118](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-135-320.jpg)
![Elementos geométricos no plano aparente
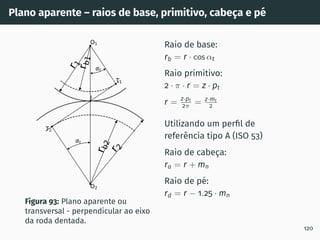
Figura 92: Ângulo de pressão sobre o
plano aparente ou transversal -
perpendicular ao eixo da roda
dentada [5].
Elementos aparentes:
medem-se num plano
perpendicular aos eixos da
engrenagem e representam-se
pelo ı́ndice t
αt ângulo de pressão aparente
mt módulo aparente
pt passo aparente
pbt passo de base aparente
119](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-136-320.jpg)
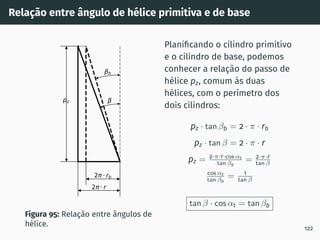
![Relação entre ângulo de pressão aparente e real
Figura 98: Corte A-A: plano aparente;
corte B-B: plano real [6].
No plano real:
lk = pn/2
tan αn
No plano aparente:
tan αt = pt/2
lk
A altura lk é comum aos dois
planos, então:
tan αt = pt/2
pn/2
tan αn
A razão entre o passo aparente
pt e o passo real pn é:
pt = pn
cos β
Então:
tan αt =
pn
cos β
pn
tan αn
tan αt =
tan αn
cos β
125](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-142-320.jpg)
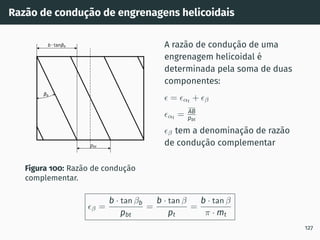
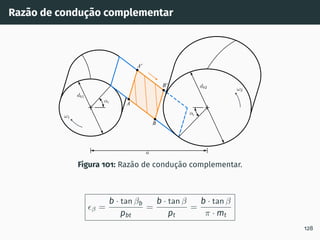
![Número virtual de dentes
Figura 99: Número virtual de dentes [6].
dn = 2·r
cos2 β = zv · mn, sendo mn = mt · cos β e 2·r
mt
= z
zv =
z
cos3 β
Para determinação das correções de dentado nos ábacos previamente
apresentados, deverá ser usado o número virtual de dentes. 126](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-143-320.jpg)
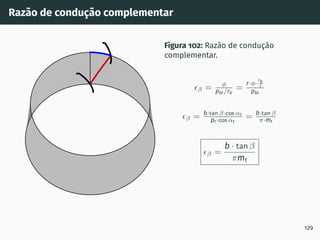
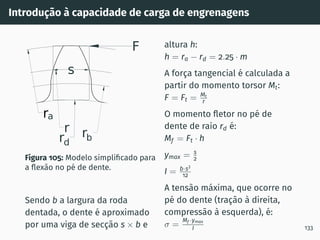
![Introdução à capacidade de carga de engrenagens
Figura 103: Forças que atuam sobre
uma engrenagem helicoidal de
hélice direita [7].
Análise de forças
Força tangencial (normalmente
conhecida):
Ft = Mt
r = P
v
Força normal:
Fn = Ft
cos αt
Força radial:
Fr = Ft · tan αt
Força axial (apenas helicoidais):
Fa = Ft · tan β
Força total:
F = Ft
cos αn·cos β
131](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-149-320.jpg)
![Introdução à capacidade de carga de engrenagens
Na prática de engenharia, é necessário conhecer qual a potência ou
binário que uma engrenagem transmite sem danificar o dentado [8].
Figura 104: Padrão de tensões numa
engrenagem de dentado reto obtido
por foto-elasticidade [8].
Através da Figura 104 podemos
verificar que as tensões
máximas observam-se na zona
de contacto e na zona do pé de
dente onde o momento fletor é
máximo.
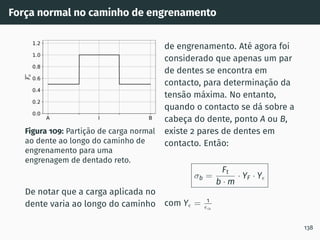
Há então duas componentes que
limitam a capacidade de carga
de uma engrenagem:
1. flexão e fadiga no pé do
dente
2. pressão de contacto
132](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-150-320.jpg)
![A Fórmula de Lewis
Figura 106: Modelo de Lewis para a flexão no pé de dente [8].
Considerações:
• inscrever uma parábola de igual resistência à flexão no dente;
• carregamento atua na cabeça do dente;
• toda a carga é suportada por apenas um par de dentes;
• não foi considerado o efeito de concentração de tensões.
135](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-153-320.jpg)
![A Fórmula de Lewis
Figura 107: Modelo de Lewis para a
flexão no pé de dente [8].
σ =
Ft·h· t
2
b·t3
12
= 6·Ft·h
b·t2
Por triângulos similares:
t/2
x = h
t/2 ⇔ t2
h = 4 · x
Definindo y = 4·x
6·π·m e Y = 1
π·y
Para α = 20◦
, y = 0.154 − 0.912/z [9].
σ = 6·Ft
b·4·x = Ft
π·b·m·y = Ft
b·m · Y
Escrevendo a força tangencial
como função do momento torsor
Ft = Mt
r e a largura como função
do módulo b = k · m:
σ =
Mt
z·m
2
π·k·m·m·y ≤ σadm
m ≥ 3
s
2 · Mt
π · k · z · y · σadm
136](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-154-320.jpg)
![Flexão no pé do dente
Figura 108: Definição ISO da secção
resistente sFn [6].
σb = (Ft·hFa)·(sFn/2)
b·sFn
3
12
=
(FN·cos α′
a·hFa)·(sFn/2)
b·sFn
3
12
=
6·FN·cos α′
a·hFa
b·sFn
2
σ =
Ft
b · m
·
6 ·
hFa
m
· cos α′
a
sFn
m
2
· cos α
=
Ft
b · m
· YF
137](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-155-320.jpg)
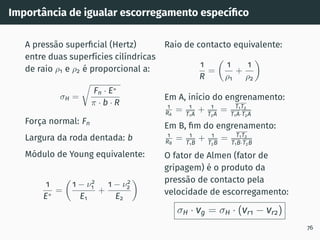
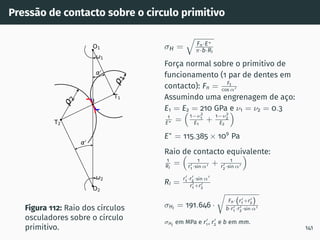
![Pressão de contacto
σH =
r
Fn · E∗
π · b · R
Figura 110: Pressão de contacto de
Hertz [5].
Força normal:
Fn
Largura da roda dentada:
b
Módulo de Young equivalente:
1
E∗ =
1−ν2
1
E1
+
1−ν2
2
E2
Raio de contacto equivalente:
1
R =
1
ρ1
+ 1
ρ2
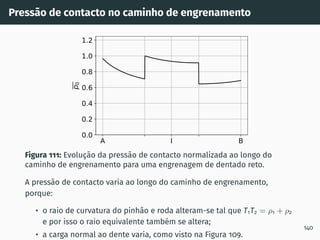
Para efeito do dimensionamento às avarias superficiais, a abordagem ISO
6336:2 considera a pressão de contacto no ponto primitivo.
139](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-157-320.jpg)
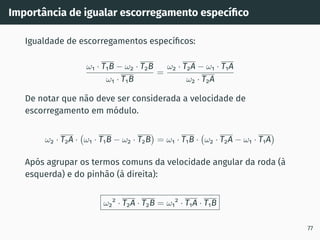
![A norma ISO 6336
Tabela 1: ISO 6336:2019 [10]
Calculation of load capacity of spur and helical gears International Standard Technical Specification Technical Report
Part 1: Basic principles, introduction and general in-
fluence factors
X
Part 2: Calculation of surface durability (pitting) X
Part 3: Calculation of tooth bending strength X
Part 4: Calculation of tooth flank fracture load capa-
city
X
Part 5: Strength and quality of materials X
Part 6: Calculation of service life under variable load X
Part 20: Calculation of scuffing load capacity (also
applicable to bevel and hypoid gears) — Flash tem-
perature method (replaces: ISO/TR 13989-1)
X
Part 21: Calculation of scuffing load capacity (also ap-
plicable to bevel and hypoid gears) — Integral tem-
perature method (replaces: ISO/TR 13989-2)
X
Part 22: Calculation of micropitting load capacity (re-
places: ISO/TR 15144-1)
X
Part 30: Calculation examples for the application of
ISO 6336 parts 1,2,3,5
X
Part 31: Calculation examples of micropitting load
capacity (replaces: ISO/TR 15144-2)
X
144](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-163-320.jpg)
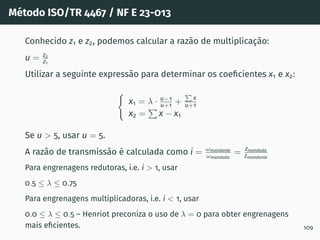
![ISO 6336-1: Considerações Gerais
A norma ISO 6336 aplica-se às seguintes situações [11, 12, 10]:
• ângulo de pressão entre 15 e 25 ◦
;
• ângulo de hélice até 30 ◦
;
• engrenagens de dentado reto ou helicoidal com razão de
condução 1 ϵα 2.5;
A norma ISO 6336 não se aplica às seguintes situações [11, 12, 10]:
• engrenagens de dentado reto ou helicoidal com razão de
condução ϵα 1;
• caso exista interferência entre a cabeça e o pé do dente;
• dentado pontiagudo;
• engrenagens sem “backlash”.
Estas normas são também desaconselhadas para aplicação em
engrenagens não metálicas. Para engrenagens poliméricas, existem
guias de cálculo especı́ficos: VDI 2545 (1981) e VDI 2736 (2016).
145](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-164-320.jpg)
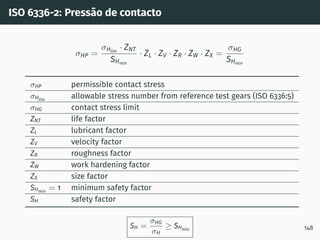
![ISO 6336-2 [13]: Pressão de contacto
Pressão de contacto nominal
(“nominal contact stress at pitch
point”):
σH0 = ZH · ZE · Zϵ · Zβ ·
q
Ft
d1·b · u+1
u
ZH zone factor Zϵ contact ratio factor
ZE elasticity factor Zβ helix angle factor
Pressão de contacto
(“contact stress”):
σH = ZB · σH0 ·
p
KA · KV · KHβ · KHα
σH ≤ σHP
ZB pinion single pair tooth contact factor
KA application factor
KV dynamic factor
KHβ face load factor for contact stress
KHα transverse load factor for contact stress
Figura 113: Zone factor ZH = Y para
α = 20◦
, escolher nas abcissas
ângulo de hélice β [13]. 147](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-166-320.jpg)
![ISO 6336-3:1996 [14] – Fadiga e flexão no pé do dente
Tensão nominal no pé do dente
(“Nominal tooth root stress”):
σF0 = Ft
b·mn
· YFa · YSa · Yϵ · Yβ
Método C que assume a carga
aplicada na cabeça do dente.
YFa form factor
YSa stress correction factor
Yϵ contact ratio factor
Yβ helix angle factor
Tensão no pé do dente
(“Tooth root stress”):
σF = σF0 · KA · KV · KFβ · KFα ≤ σFP
KA application factor
KV dynamic factor
KFα transverse load factor for tooth root stress
KFβ face load factor for tooth root stress
Figura 114: Fator de forma YFa para
hfP = 1.25 · m, haP = m, ρfP = 0.25 · m
[14].
149](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-168-320.jpg)

![Eficiência em caixas de engrenagens
PV = PVZ0 + PVZP + PVL + PVD
independentes da carga
dependentes da carga
perda de potência engrenangens rolamentos vedantes
Höhn et al. [15]
PVZ0 PVZP PVL PVD
Velocidade de rotação Potência nominal Potência nominal Velocidade de rotação
Geometria do cárter Geometria da engrenagem Geometria do rolamento Diâmetro do vedante
Viscosidade do lubrificante Lubrificante Lubrificante Viscosidade do lubrificante
152](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-171-320.jpg)
![Eficiência em caixas de engrenagens
Perda de potência devido à carga numa engrenagem PVZP
(Ohlendorf [16]):
PVZP = Pin · HVL · µmZ
Pin – potência nominal; HVL – fator geométrico de perdas; µmZ – coeficiente de atrito médio
HVL =
π·(u+1)
z1·u·cos βb
1 − ϵα + ϵ1
2
+ ϵ2
2
u = z2
z1
ϵα = AB
pbt
ϵ1 = AI
pbt
ϵ2 = IB
pbt
µmZ = 0.048 ·
Fbt
b·
P
vri
·Ri
0.2
· η−0.05
· Ra
0.25
· XL
Fbt =
Mt
rb
força tangencial ao cı́rculo de base [N]
b largura da engrenagem [mm]
P
vri
= vr1 + vr2 soma da velocidade no ponto primitivo [m/s]
Ri =
1
r′
1·sin α′ + 1
r′
2·sin α′
−1
raio equivalente no ponto primitivo [mm]
η viscosidade dinâmica do lubrificante [mPa s]
Ra rugosidade média das superfı́cie (valor tı́pico 0.5) [µm]
XL parâmetro dependente do lubrificante [17]:
Mineral sem aditivos: XL = 1 Mineral com aditivos: XL = 0.85 Sintético com aditivos: XL = 0.65
153](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-172-320.jpg)
![Referências i
[1] DIN 3998-1: Denominations on Gears and Gear Pairs: General
Definitions.
1976.
[2] Okorn, Ivan, Marko Nagode e Jernej Klemenc: Operating
performance of external non-involute spur and helical gears: A
review.
Strojniski Vestnik/Journal of Mechanical Engineering,
67(5):256–271, 2021, ISSN 00392480.
[3] Goldfarb, Veniamin, Evgenii Trubachev e Natalya Barmina:
Advanced Gear Engineering, volume 51 de Mechanisms and
Machine Science.
Springer International Publishing, 2018,
ISBN 978-3-319-60398-8.
154](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-174-320.jpg)
![Referências ii
[4] Henriot, G.: Traité théorique et pratique des engrenages.
Dunod, 1961, ISBN 2.04.005836.2.
[5] Vullo, Vincenzo: Gears, volume 10 de Springer Series in Solid
and Structural Mechanics.
Springer International Publishing, Cham, 2020,
ISBN 978-3-030-38631-3.
[6] Haberhauer, Horst: Maschinenelemente.
Springer Berlin Heidelberg, Berlin, Heidelberg, 2018.
[7] Budynas, Richard G. e J. Keith Nisbett: Shigley’s Mechanical
Engineering Design.
10a
edição, 2014, ISBN 978-0-07-339820-4.
155](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-175-320.jpg)
![Referências iii
[8] Juvinall, Robert C. e Kurt M. Marshek: Fundamentals of Machine
Component Design.
Wiley, 2017.
[9] Castro, Paulo M. S. Tavares de e Sérgio M. O. Tavares:
Capacidade de carga das rodas dentadas.
Órgãos de Máquinas, DEMec, Faculdade de Engenharia da
Universidade do Porto, 2013.
[10] ISO 6336-1:2019: Calculation of load capacity of spur and helical
gears - Part 1: Basic principles, introduction and general
influence factors.
2019.
156](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-176-320.jpg)
![Referências iv
[11] ISO 6336:1996: Calculation of load capacity of spur and helical
gears - Part 1: Basic principles, introduction and general
influence factors.
1996.
[12] ISO 6336:2006: Calculation of load capacity of spur and helical
gears - Part 1: Basic principles, introduction and general
influence factors.
2006.
[13] ISO 6336-2:2006: Calculation of load capacity of spur and
helical gears. Part 2: Calculation of surface durability (pitting).
2006.
[14] ISO 6336-3:1996: Calculation of load capacity of spur and helical
gears. Part 3: Calculation of tooth bending strength.
1996.
157](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-177-320.jpg)
![Referências v
[15] Höhn, B. R., Klaus Michaelis e T. Völlmer: Thermal Rating of
Gear Drives Balance Between Power Loss and Heat Dissipation.
AGMA Technical Paper, 96:12, 1996.
[16] Ohlendorf, H: Verlustleistung und Erwärmung von Stirnrädern.
Tese de Doutoramento, Dissertation TU München, 1958.
[17] Fernandes, Carlos M.C.G., Pedro M.T. Marques, Ramiro C. Martins
e Jorge H.O. Seabra: Gearbox power loss. Part II: Friction losses
in gears.
Tribology International, 88:309–316, 2015.
158](https://image.slidesharecdn.com/01-240118234943-ed52537e/85/01-pdf-178-320.jpg)































![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-180925140702-thumbnail.jpg?width=640&height=640&fit=bounds)




![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-141202061309-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-141202061304-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)



























