

Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (17)
Destaque
Destaque (20)
Semelhante a Cinemática em 40
Semelhante a Cinemática em 40 (20)
Último
Último (20)
Cinemática em 40
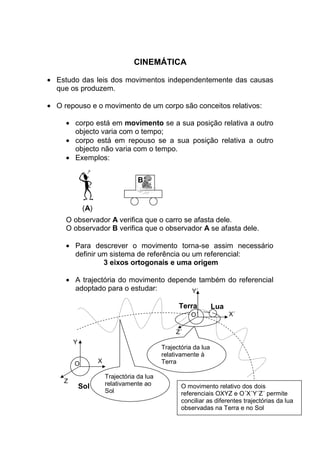
- 1. CINEMÁTICA • Estudo das leis dos movimentos independentemente das causas que os produzem. • O repouso e o movimento de um corpo são conceitos relativos: • corpo está em movimento se a sua posição relativa a outro objecto varia com o tempo; • corpo está em repouso se a sua posição relativa a outro objecto não varia com o tempo. • Exemplos: B (A) O observador A verifica que o carro se afasta dele. O observador B verifica que o observador A se afasta dele. • Para descrever o movimento torna-se assim necessário definir um sistema de referência ou um referencial: 3 eixos ortogonais e uma origem • A trajectória do movimento depende também do referencial adoptado para o estudar: Y´ Terra O´ Lua X´ Z´ Y O Z Sol Trajectória da lua relativamente à Terra X Trajectória da lua relativamente ao Sol O movimento relativo dos dois referenciais OXYZ e O´X´Y´Z´ permite conciliar as diferentes trajectórias da lua observadas na Terra e no Sol
- 2. Paradoxo de Zeno e Elea (495-435 aC) L L/2 L/4 L/8 • A corredora vai percorrendo metade do percurso que falta para chegar à árvore. • A corredora nunca mais chega até à árvore pois falta sempre percorrer uma fracção do percurso. O intervalo de tempo total necessário é infinito !! • Para os gregos antigos a descrição matemática do movimento era problemática. • O paradoxo surge porque se parte do princípio de que a soma de um número infinito de termos é infinito. • Como resolver o paradoxo? O percurso é efectuado com uma velocidade constante, v. Logo, para cada uma dos percursos tem-se Como (∆x )1 = v= (∆x )i (∆x )i ⇒ (∆t )i = (∆t )i v L L L L L ; (∆x )2 = ; (∆x )3 = ; (∆x )4 = ; ...... ; (∆x )n = 2 4 8 24 2n Somando todos os intervalos de tempo ∆t = (∆t )1 + (∆t )2 + (∆t )3 + ..... + (∆t )n = tomando o limite n→∞ conclui-se que ∆t = L1 1 1 1 L 1 + + + ... + = 1 − v2 4 8 2n v 2n L resolvendo-se o paradoxo. v
- 3. Movimento Curvilíneo • Partícula descreve uma trajectória curvilínea no espaço Z tA A s ∆s tB B ∆r Os rA rB ^ k ^ i O ^ j Y X s - deslocamento ao longo da trajectória curvilínea relativamente a um ponto arbitrário Os sA=OsA sB=OsB r - vector-posição: define a posição da partícula na trajectória através de um sistema referencial XYZ com origem no ponto O ^ ^ r = OA= x ^ + y j + z k i A A A A ^ ^ ^ rB = OB= xB i + yB j + zB k ∆s - deslocamento ao longo da curva ∆r - deslocamento ∆s= AB ∆r = rB - rA = AB ^ ^ ^ =(xB - xA )i + (yB - yA ) j + (zB - zA ) k ^ ^ ^ = ∆x i + ∆y j + ∆z k • Velocidade média r −r ∆r ∆x ^ ∆y ^ ∆z ^ v med = B A = = i+ j+ k ∆t ∆t ∆t ∆t tB − t A ( v med ∆r )
- 4. • Velocidade instantânea ( v ) t2 v ^ uT v med3 = B2 t1 B1 ∆r1 ∆r2 t3 B3 ∆r3 t0 A v med2 = t3 − t0 ∆r 2 t2 − t 0 vmed1 vmed3 ∆r1 = ∆r 3 ∆t3 = ∆r 2 ∆t 2 ∆r1 t 1 − t 0 ∆t1 ∆t1 < ∆t 2 < ∆t1 v med1 = vmed2 ∆r 3 = ûT é o versor da tangente à trajectória no ponto considerado ∆r dr v = lim v med = lim = ∆t → 0 ∆t → 0 ∆t dt ^ Conclui-se que v u T ou seja a velocidade instantânea, v , num dado ponto é um vector tangente à trajectória nesse ponto. v = dr dx ^ dy ^ dz ^ = i+ j+ k dt dt dt dt ^ ^ ^ = vx i + vy j + vz k v= v = 2 2 v 2 + vy + vz x dx vx = dt dy com v y = dt dz v z = dt
- 5. Por outro lado e usando o deslocamento ao longo da trajectória (∆s): ∆r ∆s ∆r = lim ∆r v = lim = lim ∆t → 0 ∆t ∆t → 0 ∆s ∆t ∆t → 0 ∆s lim ∆s ∆t → 0 ∆t ds =v dt pois ∆s 0 quando ∆t 0 ∆r dr = lim ∆s → 0 ∆s ds Velocidade escalar pois à medida que ∆s se aproxima de zero ^ ∆s ≈ dr e dr é uT Logo ^ a uT ^ v = vuT • Aceleração média (a velocidade pode variar em módulo e em direcção) Z tA A vA ∆v = vB - vA vB amed ^ k ^ i X O ^ j Y tB B vB
- 6. a med = ∆v ∆v x ^ ∆v y ^ ∆v z ^ = i + k j + ∆t ∆t ∆t ∆t • Aceleração instantânea ( a ) a = lim a med ∆t →0 ∆v d v d 2 r = lim = = dt ∆t →0 ∆t dt 2 a aceleração é sempre dirigida para a concavidade da curva pois a velocidade varia na direcção de curvatura da trajectória dv x d 2 x = a x = dt dt 2 dv y ^ dv z ^ dv dv ^ a = = x i+ j+ k dv y d 2 y dt dt dt dt com a y = = dt dt 2 ^ ^ ^ = ax i + ay j + az k 2 a = dv z = d z z dt dt 2 2 2 a = a = a 2 + a y + az x • Conhecendo a aceleração a(t) podem-se determinar integração a velocidade e a posição em qualquer instante t : v t t dv a = ⇔ d v = a dt ⇔ ∫ d v = ∫ a dt ⇔ v = v o + ∫ a dt dt t t vo o o r t t t dr v o + ∫ a dt dt v = ⇔ d r = v dt ⇔ ∫ d r = ∫ v dt ⇔ r = ro + ∫ dt to to to ro por
- 7. t v x = v ox + ∫ a x dt to t v y = v oy + ∫ a y dt to t v z = v oz + ∫ a z dt to t x = x o + ∫ v ox + ∫ a x dt dt to to t t t y = y o + ∫ v oy + ∫ a y dt dt to to t t z = z o + ∫ v oz + ∫ a z dt dt to to • Movimento com aceleração constante t v = v o + ∫ a dt = v o + a (t − t o ) to v está sempre no plano definido por vo e a t r − ro = ∫ v dt = v o (t − t o ) + a (t − t o )2 to r - ro encontra-se no plano definido por vo e a Conclui-se que O movimento com aceleração constante ocorre sempre num plano
- 8. • Tipos de movimento (independentemente em cada uma das coordenadas x, y ou z): i) ii) a=0 => v=constante => movimento uniforme a=constante => movimento uniformemente variado a v > 0 => movimento uniformente acelerado (a velocidade aumenta ao longo do tempo) a v < 0 => movimento uniformente retardado (a velocidade diminui ao longo do tempo) • Se se conhecer a dependência da aceleração no tempo, a = f(t), é possível calcular a velocidade da partícula: Exemplos de aplicação: • Movimento uniforme : v=constante=v t to => a = 0 t to x = x o + ∫ v dt = x o + v ∫ dt = x o + v (t-t o ) • Movimento uniformemente acelerado ou retardado: a = constante=a t t to to v = v o + ∫ a dt = v o + a ∫ dt = v o + a (t-t o ) t t to to x = x o + ∫ v dt = x o + ∫ [v o + a ( t − t o )] dt = x o + v o (t-t o ) + a ( t − t o )2 2
- 9. • Exemplo: Movimento de um Projéctil (movimento curvilíneo de um corpo sujeito à aceleração constante da gravidade) 1) 2) 3) 4) Y Escolher sistema de eixos Definir a posição inicial ro Definir a velocidade inicial vo Definir a aceleração a vA A vx P vo g vy y α v g B X x g ro = 0 t o = 0s v o = v ox i + v oy j = v o cos (α ) i + v o sen (α ) j ^ ^ ^ ^ ^ a = g = −g j v = v o + a (t − t o ) = v ox i + v oy j − g t j ^ ^ ^ = v o cos(α ) i + (v o sen(α ) − g t ) j ^ vx ^ vy t t x + v dt ^ + y + v dt ^ r = x i +y j = o ∫ x i j o ∫ y to to ^ ^ t t ∫ [v o cos (α )]dt ^ + ∫ [v o sen (α ) − g t ]dt ^ = i j 0 0
- 10. x = v o cos(α )t 1 2 y = v o sen (α )t − 2 gt Equação da trajectória de um projéctil: t= g x ⇒ y = x tg(α ) − x 2 2 v o cos(α ) 2v o cos 2 (α ) Trajectória do projéctil é uma parábola No ponto mais alto (ponto A) tem-se vy=0 (velocidade horizontal) : v sen(α ) v o sen(α ) − g t A = 0 ⇒ t A = o g a altura máxima que o projéctil atinge é então v sen(α ) 1 v o sen(α ) h max = y(t = t A ) = v o sen (α ) o − g g 2 g 2 2 v o sen 2 (α ) h max = 2g O tempo necessário para o projéctil atingir o solo (tempo total de trânsito) é calculado considerando y=0 : 0 = v o sen(α )t B − 2 v o sen(α ) 1 2 g tB ⇒ tB = = 2t A 2 g corresponde a duas vezes o tempo para atingir a altura máxima (tA)
- 11. O alcance do projéctil correponde ao valor de xB : x( t = t B ) = v o cos(α )t B = v o cos(α ) 2v o sen (α ) g ⇓ x max = 2 v 0 sen(2α ) g Qual a orientação da velocidade inicial para a qual o alcançe é máximo? 2 2v 0 cos(2α max ) d x max =0⇒ = 0 ⇒ 2α max = 90 º ⇒ α max = 45 º dα g Os resultados anteriores para o movimento do projéctil são válidos se: 1) O alcance é suficientemente pequeno para se poder desprezar a curvatura da superfície terrestre; 2) A altitude é suficientemente pequena para que a variação da aceleração da gravidade com a altura seja insignificante; 3) A velocidade inicial é suficientemente pequena para que a resistência não seja importante.