











































































![116
multiplica-se pela diferença de nível entre as duas curvas (altura).
Quando se tratar do cume, utiliza-se a área da base x altura / 3,
fórmula semelhante ao cálculo de volume do cone. Além disso,
acrescenta-se o empolamento.
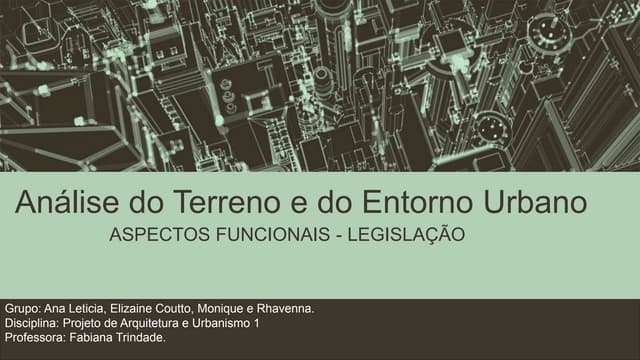
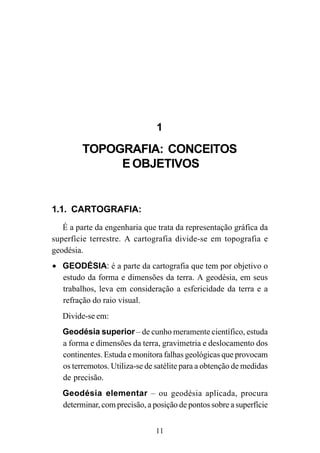
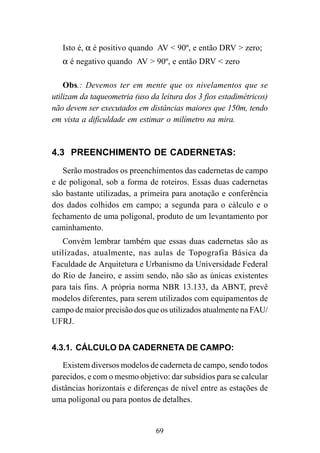
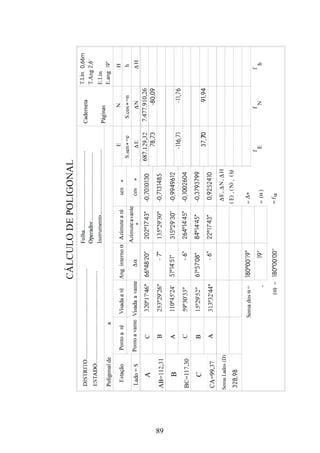
Exemplo:
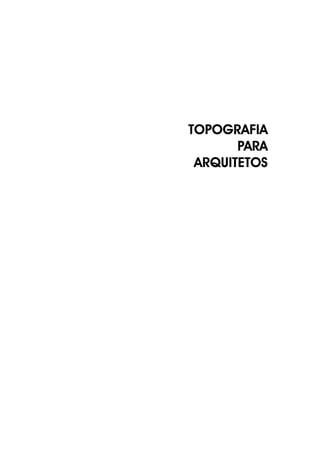
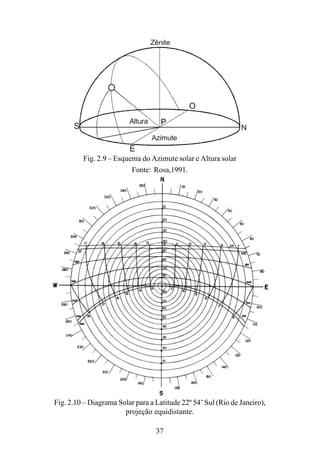
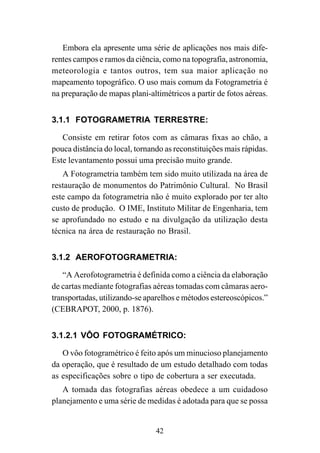
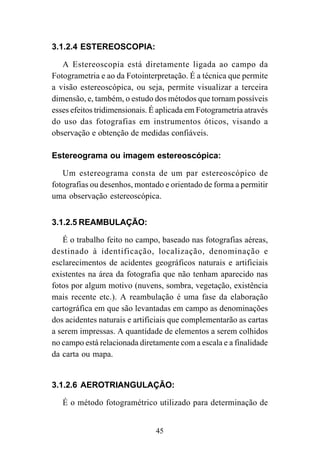
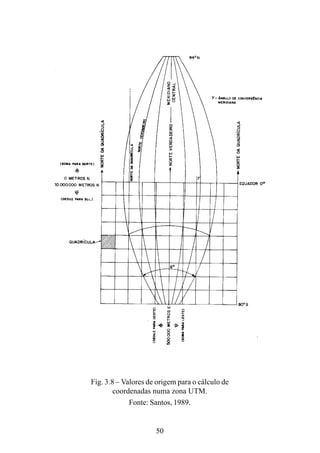
Calcular a quantidade de terras vegetais acima da curva de
nível 30 na figura abaixo, dados:
área da base maior (30) = 300m²
área da base menor (40) = 80m²
cota do cume = 45,4m
Volume entre 30 e 40 = [(300+80)/2]x10 = 1900m³
Volume entre 40 e o cume = (80x5,4)/3 = 144m³
Volume total = 1900+144 = 2044m³
Volume incluindo o Empolamento: 25%
2044 x 1.25 = 2.555m³
10
10
30
30
20
20
40
40
Fig. 6.9 – Exemplo para exercício de cálculo de volume.](https://image.slidesharecdn.com/topografiaparaarquitetos-130531161528-phpapp01/85/Topografia-para-arquitetos-117-320.jpg)



![124
elaboração de projetos de alinhamento na cidade do Rio de
Janeiro. Rio de Janeiro: IBAM/CPU, 1996.
INSTITUTO DE PESQUISAS TECNOLÓGICAS DO
ESTADO DE SÃO PAULO – IPT. Ocupação de encostas.
São Paulo: IPT, 1991.
INSTITUTO DE PESQUISAS TECNOLÓGICAS DO
ESTADO DE SÃO PAULO – IPT. Manual de geotecnologia
– Taludes de Rodovias: orientação para diagnóstico e soluções de
seus problemas. São Paulo: IPT, 1991.
INSTITUTO DE PESQUISAS TECNOLÓGICAS DO ESTADO
DE SÃO PAULO – IPT. Loteamentos: Manual de
Recomendações para Elaboração de Projeto. São Paulo: IPT, 1986.
JOLY, Fernand. A cartografia. Campinas: Papirus, 1990.
LOCH, Carlos. A interpretação de imagens aéreas: noções
básicas e algumas aplicações nos campos profissionais.
Florianópolis: Ed. da UFSC, 1993.
MARCHETTI, Delmar A.B., GARCIA, Gilberto J. Princípios
de fotogrametria e fotointerpretação. São Paulo: Nobel, 1986.
MEIRELLES, Hely Lopes. Direito de construir. São Paulo:
Malheiros, 2000.
NEUFERT, Ernst. Arte de projetar em arquitetura. 16 ed. São
Paulo: Gustavo Gili, 2002.
RANGEL, Alcyr Pinheiro. Desenho projetivo – projeções
cotadas. 3 ed. Rio de Janeiro: Livros Técnicos e Científicos, 1976.
ROSA, Lourdes Zunino. arquitetura e meio ambiente. Universidade
Federal do Rio de Janeiro, Faculdade de Arquitetura e Urbanismo,
Mestrado em Arquitetura. Rio de Janeiro, mimeo,1991.
RUIZ, José Zurita. Topografia – prática do construtor.
Tradução de Manuel Ruas. 3. Ed. Barcelona: Plátano, [19—].](https://image.slidesharecdn.com/topografiaparaarquitetos-130531161528-phpapp01/85/Topografia-para-arquitetos-125-320.jpg)




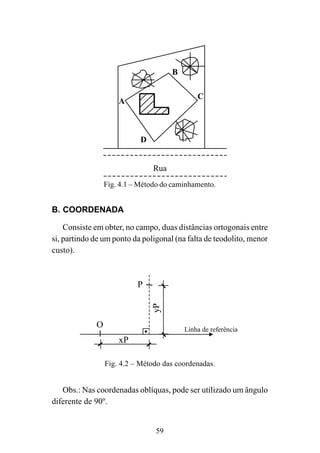
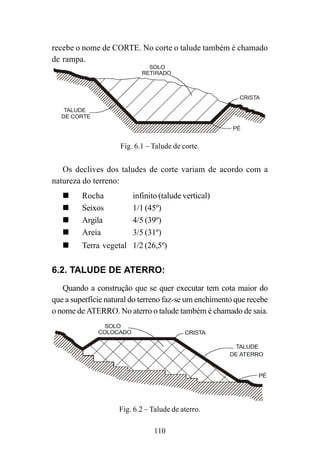
1. Este documento fornece informações sobre um livro digital sobre topografia para arquitetos, incluindo título, autores e editora. 2. É proibida a reprodução do arquivo digital de acordo com as leis de direitos autorais. 3. O livro aborda vários conceitos e métodos de topografia relevantes para arquitetos, como representação do relevo do solo, orientação, mapeamento e levantamentos topográficos.