Baixado 604 vezes

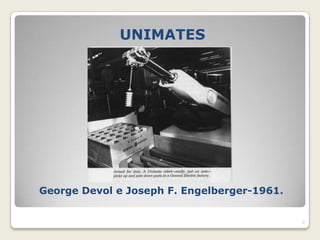
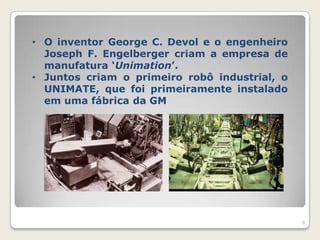
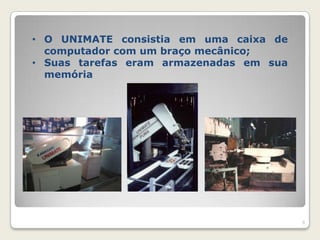


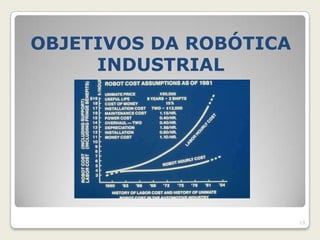

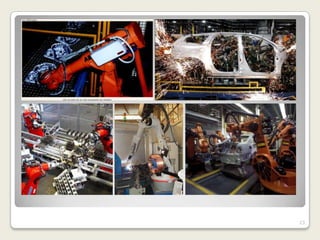






O documento fornece uma introdução sobre robótica industrial, definindo o que é um robô e descrevendo a origem do termo. Resume a história inicial da robótica industrial, desde os primeiros manipuladores mestre-escravo até o desenvolvimento do Unimate, o primeiro robô industrial. Também descreve objetivos, vantagens, desvantagens e aplicações comuns de robôs industriais.