Baixado 10 vezes








![θ(0) =
0 0 0
0 0 0
0
0
0.01 0.01 0.01
0.2 0.2 0.2
0.01
0.2
____________________________________
φ(0)=
0 0 0
0 0 0
0
0
0 0 0
0 0 0
0
0
𝑦(0) =
0
0
0
𝑦(0) =
0
0
0
𝑢(0) =
0
0
0
Cálculo do MQR
A saída do sistema é calculada da seguinte forma
y(k)=-a1*y(k-1)-a2*y(k-2)+b0*u(k-1)+b1*u(k-2);
desse modo podemos atualizar o φ, o erro e o ganho do estimador
φ (k-1)=[-y(k-1) -y(k-2) u(k-1) u(k-2)]'
e(k)=y(k)- φ(k-1)'* θ (k-1)
K=P* φ (k-1)/(λ + φ(k-1)'*P* φ (k-1))
Calculamos o novo vetor de estimação de parâmetros
Teta(k)=Teta(k-1)+K*e(k);
A partir desses dados se atualiza a matriz de covariância
P=(P-K* φ (k-1)'*P)/λ
A próxima etapa é armazenar os parâmetros atualizados
Teta(k) = [ a1atualizado a2atualizado b0atualizado b1atualizado]’
PASSO 2: aplicar o método de alocação de pólos e grau mínimo dado pelo algoritmo
3.1 onde os polinômios A e B são os estimadores obtidos no passo 1. Os polinômios R,S
e T do controlador então são obtidos:](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-8-320.jpg)









![RESPOSTA
Como H(z) não é fase mínima cancelaremos B-
= B entre 𝑅 e 𝑆. Um STR indireto é
dado pela equação 3.24
A0Amym = 𝑅u + 𝑆y
Com
𝑅 = B-
R, 𝑆 = B-
S, T = B’mA0.
Além do mais temos
A0Amym = A0Bmuc = A0BB’muc = BTuc = 𝑇uc
y = 𝑅
1
𝐴0𝐴𝑚
u + 𝑆
1
𝐴0𝐴𝑚
y
ym = 𝑇
1
𝐴0𝐴𝑚
uc
Ɛ = y – ym = 𝑅uf + 𝑆yf - 𝑇ucf
3.6 Considere a simulação do regulador de auto sintonização indireta usado no exemplo
3.5. investigue como o comportamento do transiente do algoritmo depende do valor
inicial de teta, da matriz de covariância e o fator de esquecimento.
RESPOSTA
Para resolução deste problema usaremos 3 valores distintos para cada variável
mencionada no enunciado, os valores são:
λ1= 1
λ 2= 0.85
λ 3 = 0.65
P1 = diag([200 200 2 2])
P2 = diag([100 100 1 1])
P3 = diag([50 50 0.5 0.5])
θ1 = [0 0 0.01 0.2]T
θ 2 = [0 0 0.1 2]T
θ 3 = [0 0 1 20]T
vamos agora analisar a influência de lambda](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-20-320.jpg)

![vamos agora analisar a influência da matriz de covariância (considerando lambda = 1).
Para covariancia = diag([200 200 2 2])
Para covariância = diag([100 100 1 1])
Para covariância = diag([50 50 0.5 0.5])
Percebemos que quanto menor o valor o valor inicial de teta, o sistema passar a ter uma
“dificuldade em acompanhar” inicialmente o valor de referência aumentando o valor do
erro de regime permanente.](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-22-320.jpg)
![vamos agora analisar a influência de teta (considerando lambda = 1 e
cov = [100 100 1 1] ).
.
Para teta = [0 0 0.01 0.2]T
Para teta = [0 0 0.1 2]T
Para teta = [0 0 1 20]T
O valor inicial de teta deve ser o menor possível, pois a mínima variação pode causar a
instabilidade no sistema.](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-23-320.jpg)





![ANEXOS
/////////////////EXEMPLO 3.4///////////////////////////////
%% STR indireto usando MQR e MDPP
% Astrom & Wittenmark, Exemplo 3.4, p.104
% Prof. André Ferreira - 29/01/2014
% MODIFICADO POR PEDRO JUNIOR
clear all
close all
clc
%% Definição da planta
planta=tf(1,[1 1 0]); % Planta analógica
Ts=0.5; % Intervalo de amostragem
planta_discretizada=c2d(planta,Ts); % Planta discretizada
% Parâmetros da planta
[numd,dend]=tfdata(planta_discretizada,'v');
b0=numd(2);
b1=numd(3);
a1=dend(2);
a2=dend(3);
%% Sistema em MF desejado
csi=0.7;
freq_nat=1;
% Pólos discretos desejados
pol_des=exp(-csi*freq_nat*Ts + j*freq_nat*sqrt(1-csi^2)*Ts);
Pol_des=[pol_des conj(pol_des)];
% FT desejada em MF
Am=poly([pol_des conj(pol_des)]);
Bm=[polyval(Am,1) 0]; % Escolhido para ter ganho DC unitário
func_desej_disc=tf(Bm,Am,Ts);
% Parâmetros da planta desejada em MF
[nummd,denmd]=tfdata(func_desej_disc,'v');
bm0=nummd(2);
am1=denmd(2);
am2=denmd(3);
%% Vetor de Entrada - Onda Quadrada (u)
uc = [];
neg=-1*ones(1,25);
pos=ones(1,25);
for i = 1:3
uc = [uc pos neg];
end
%% Condições iniciais necessários para o MQR
N = length(uc); % Número de realizações (medidas)
lambda = 0.65; %pulo do gato - valor escolhido por tentativa e erro](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-29-320.jpg)
![covP0 = diag([100 100 1 1]); % Inicializar a matriz de covariância
*****
Theta0 = [0 0 0.01 0.2]'; % Inicializar o vetor de parâmetros Teta
estimado *****
fi0=[0 0 0 0]';
yest=[0 0 0]';
diagP=diag(covP0)';
Theta=[Theta0 Theta0 Theta0];
fi=[fi0 fi0 fi0];
diagP=[diagP; diagP; diagP];
P=covP0;
cont=0*Theta;
y=0*yest;
u=0*yest;
erro=0*yest;
for k = 4:N
%% MQR
% ----- Calcula a saída atual
y(k)=-a1*y(k-1)-a2*y(k-2)+b0*u(k-1)+b1*u(k-2); % Saída da
planta
% ----- Atualiza Fi
fi(:,k-1)=[-y(k-1) -y(k-2) u(k-1) u(k-2)]';
% ----- Calcula o erro de estimação
erro(k)=y(k)-fi(:,k-1)'*Theta(:,k-1);
% ----- Calcula o vetor de ganhos
K=P*fi(:,k-1)/(lambda+fi(:,k-1)'*P*fi(:,k-1));
% ----- Calcula o novo vetor de estimação de parâmetros
Theta(:,k)=Theta(:,k-1)+K*erro(k);
% ----- Atualiza a matriz de covariância
P=(P-K*fi(:,k-1)'*P)/lambda;
diagP=[diagP; diag(P)'];
% ----- Armazena parâmetros
a1est = Theta(1,k);
a2est = Theta(2,k);
b0est = Theta(3,k);
b1est = Theta(4,k);
%% PASSO 2 - valores dos polinômios R, S e T
r1 = b1est/b0est;
s0 = (am1-a1est)/b0est;
s1 = (am2-a2est)/b0est;
t0 = bm0/b0est;
cont(:,k)=[r1 s0 s1 t0]';
%Polinômios R, S e T:
R= tf([1 b1est/b0est],1,0.5); %tf([1 r1],1,0.5);
S=tf([s0 s1],1,0.5);
%t0= beta*1;
%t1= beta*a0;
T= tf([(bm0/b0est) 0],1,0.5); %tf([t0 t1],1,0.5);
cont(:,k)=[r1 s0 s1 t0]';](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-30-320.jpg)
![%% PASSO 3 - cálculo da lei de controle
u(k)=-r1*u(k-1) +t0*uc(k) -s0*y(k) -s1*y(k-1); % Sinal de controle
% Limite do sinal de controle
if u(k)>=4,
u(k)=4;
elseif u(k)<=-4,
u(k)=-4;
end
end
subplot(221)
hold on
plot(uc,'r--')
plot(y,'b')
legend('uc','y')
xlabel('Amostras')
title('Saída e Referência');
subplot(223)
stairs(u,'b')
legend('u')
xlabel('Amostras')
title('Sinal de Controle');
subplot(224)
stairs(cont')
legend('r1','s0','s1','t0')
xlabel('Amostras')
title('Parâmetros do Controlador');
subplot(222)
stairs(Theta')
legend('a1','a2','b0','b1')
xlabel('Amostras')
title('Parâmetros Estimados');
hold off
///////////////////////////////////////////////////////////
////////EXEMPLO 3.5////////////////////////////////////////
%% STR indireto usando MQR e MDPP
% Astrom & Wittenmark, Exemplo 3.4, p.104
% Prof. André Ferreira - 29/01/2014
%MODIFICADO POR PEDRO JUNIOR
clear all
close all
clc
%% Definição da planta
g=tf(1,[1 1 0]); % Planta analógica
Ts=0.5; % Intervalo de amostragem
gd=c2d(g,Ts); % Planta discretizada](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-31-320.jpg)
![% Parâmetros da planta
[numd,dend]=tfdata(gd,'v');
b0=numd(2);
b1=numd(3);
a1=dend(2);
a2=dend(3);
%% Sistema em MF desejado
csi=0.7;
Wn=1;
% Pólos discretos desejados
pdes=exp(-csi*Wn*Ts + j*Wn*sqrt(1-csi^2)*Ts);
Pdes=[pdes conj(pdes)];
% FT desejada em MF
Am=poly([pdes conj(pdes)]);
Bm=[polyval(Am,1) 0]; % Escolhido para ter ganho DC unitário
gmd=tf(Bm,Am,Ts);
% Parâmetros da planta desejada em MF
[nummd,denmd]=tfdata(gmd,'v');
bm0=nummd(2);
am1=denmd(2);
am2=denmd(3);
%Polinômio A0:
a0=0; %Este parâmetro é sugerido no próprio livro
A0=tf([1 a0],[1],0.5);
%% Vetor de Entrada - Onda Quadrada (u)
uc = [];
neg=-1*ones(1,25);
pos=ones(1,25);
for i = 1:3
uc = [uc pos neg];
end
%% Condições iniciais necessários para o MQR
N = length(uc); % Número de realizações (medidas)
lambda = 0.65; %pulo do gato (^-^)
P0 = diag([100 100 1 1]); % Inicializar a matriz de covariância *****
Teta0 = [0 0 0.01 0.2]'; % Inicializar o vetor de parâmetros Teta
estimado *****
fi0=[0 0 0 0]';
yest=[0 0 0]';
diagP=diag(P0)';
Teta=[Teta0 Teta0 Teta0];
fi=[fi0 fi0 fi0];
diagP=[diagP; diagP; diagP];
P=P0;
cont=0*Teta;](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-32-320.jpg)
![y=0*yest;
u=0*yest;
erro=0*yest;
for k = 4:N
%% MQR
% ----- Calcula a saída atual
y(k)=-a1*y(k-1)-a2*y(k-2)+b0*u(k-1)+b1*u(k-2); % Saída da
planta
% ----- Atualiza Fi
fi(:,k-1)=[-y(k-1) -y(k-2) u(k-1) u(k-2)]';
% ----- Calcula o erro de estimação
erro(k)=y(k)-fi(:,k-1)'*Teta(:,k-1);
% ----- Calcula o vetor de ganhos
K=P*fi(:,k-1)/(lambda+fi(:,k-1)'*P*fi(:,k-1));
% ----- Calcula o novo vetor de estimação de parâmetros
Teta(:,k)=Teta(:,k-1)+K*erro(k);
% ----- Atualiza a matriz de covariância
P=(P-K*fi(:,k-1)'*P)/lambda;
diagP=[diagP; diag(P)'];
% ----- Armazena parâmetros
a1est = Teta(1,k);
a2est = Teta(2,k);
b0est = Teta(3,k);
b1est = Teta(4,k);
%Operador de Transferência:
%am1=Amq(2);
%am2=Amq(3);
beta=((1+am1+am2)/(b0est+b1est));
bm0=beta*b0est;
bm1=beta*b1est;
Hmq=tf([bm0 bm1],[1 am1 am2],0.5);
%% PASSO 2 - valores dos polinômios R, S e T
% r1 = b1est/b0est;
% s0 = (am1-a1est)/b0est;
% s1 = (am2-a2est)/b0est;
% t0 = bm0/b0est;
% cont(:,k)=[r1 s0 s1 t0]';
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%5
%Coeficientes r1, s1 e s0:
r1=((a0*am2*(b0est*b0est))+((a2est-am2-a0*am1)*(b1est*b0))+((a0+am1-
a1est)*(b1est*b1est)))/((b1est*b1est)-
(b1est*b0est*a1est)+(a2est*(b0est*b0est)));
s1=((a0*am2)-(a2est*r1))/(b1est);
s0=((am1+a0)-(r1+a1est))/(b0est);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Polinômios R, S e T:
R=tf([1 r1],1,0.5);
S=tf([s0 s1],1,0.5);
t0= beta*1;
t1= beta*a0;
T=tf([t0 t1],1,0.5);](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-33-320.jpg)
![cont(:,k)=[r1 s0 s1 t0]';
% %Polinômios R, S e T:
%R= tf([1 b1/b0],1,0.5); %tf([1 r1],1,0.5);
%S=tf([s0 s1],1,0.5);
%t0= beta*1;
%t1= beta*a0;
%T= tf([(bm0/b0) 0],1,0.5); %tf([t0 t1],1,0.5);
%% PASSO 3 - cálculo da lei de controle
u(k)=-r1*u(k-1) +t0*uc(k) -s0*y(k) -s1*y(k-1); % Sinal de controle
% Limite do sinal de controle
if u(k)>=4,
u(k)=4;
elseif u(k)<=-4,
u(k)=-4;
end
end
subplot(221)
hold on
plot(uc,'r--')
plot(y,'b')
legend('uc','y')
xlabel('Amostras')
title('Saída e Referência');
subplot(223)
stairs(u,'b')
legend('u')
xlabel('Amostras')
title('Sinal de Controle');
subplot(224)
stairs(cont')
legend('r1','s0','s1','t0')
xlabel('Amostras')
title('Parâmetros do Controlador');
subplot(222)
stairs(Teta')
legend('a1','a2','b0','b1')
xlabel('Amostras')
title('Parâmetros Estimados');
hold off
///////////////////////////////////////////////////////////
///////////EXEMPLO 3.7 & 3.8//////////////////////////////
%Aluno:PEDRO JUNIOR
%Exemplo 3.7 E 3.8
clear all
close all
clc](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-34-320.jpg)
![%% Função de transferencia
G=tf(1,[1 1 0]);
%Tempo de amostragem
h=0.5;
%Função de transferencia discretizada
Gd=c2d(G,h);
%Parametros da planta
[Bd,Ad]=tfdata(Gd,'v');
b0=Bd(2);
b1=Bd(3);
a1=Ad(2);
a2=Ad(3);
%% Sistema desejado em malha fechada
%Dados para o sistema em malha fechada
csi=0.7;
Wn=1;
% Pólos discretos desejados
pdes=exp(-csi*Wn*h + j*Wn*sqrt(1-csi^2)*h);
P=[pdes conj(pdes)];
% FT desejada em MF
Am=poly([pdes conj(pdes)]);
Bm=[polyval(Am,1) 0];
Gmd=tf(Bm,Am,h);
% Parâmetros da planta desejada em malha fechada
[Bmd,Amd]=tfdata(Gmd,'v');
bm0=Bmd(2);
am1=Amd(2);
am2=Amd(3);
%% Vetor de Entrada para a Onda Quadrada (uc);
N=input(' Entre com o numero de Interações?:');
%% Sinal de entrada Onda Quadrada;
j=0;
while j<N
for j=j+1:j+25
uc(j)=1;
end
for j=j+1:j+25
uc(j)=-1;
end
end
%% Condições iniciais necessários para o MQR
N = length(uc); % Número de realizações (medidas)
lambda = 1;
P0 = 100*eye(4); % Inicializar a matriz de covariância *****
Teta0 = [0.1 0 0 0]'; % Inicializar o vetor de parâmetros Teta
estimado *****
fi0=[0 0 0 0]';](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-35-320.jpg)
![yest=[0 0 0]';
diagP=diag(P0)';
Teta=[Teta0 Teta0 Teta0];
fi=[fi0 fi0 fi0];
diagP=[diagP; diagP; diagP];
P=P0;
cont=0*Teta;
y=0*yest;
u=0*yest;
yf=0*yest;
uf=0*yest;
erro=0*yest;
%d0=1; % Atraso do sistema exemplo 3.7
d0=2; % Atraso do sistema exemplo 3.8
for k = 4:N
%% MQR
% ----- Calcula a saída atual
y(k)=-a1*y(k-1)-a2*y(k-2)+b0*u(k-1)+b1*u(k-2); % Saída da
planta
% ----- Atualiza Fi
fi(:,k-d0)=[uf(k-d0) uf(k-d0-1) yf(k-d0) yf(k-d0-1)]';
% ----- Calcula o erro de estimação
erro(k)=y(k)-fi(:,k-d0)'*Teta(:,k-1);
% ----- Calcula o vetor de ganhos
K=P*fi(:,k-d0)/(lambda+fi(:,k-d0)'*P*fi(:,k-d0));
% ----- Calcula o novo vetor de estimação de parâmetros
Teta(:,k)=Teta(:,k-1)+K*erro(k);
% ----- Atualiza a matriz de covariância
P=(P-K*fi(:,k-d0)'*P)/lambda;
diagP=[diagP; diag(P)'];
% ----- Armazena parâmetros
r0 = Teta(1,k);
r1 = Teta(2,k);
s0 = Teta(3,k);
s1 = Teta(4,k);
t0 = 1 + am1 + am2; % constante
%% PASSO 2 - Guarda parâmetros normalizados por ro
cont(:,k)=[r1/r0 s0/r0 s1/r0 t0/r0];
%% PASSO 3 - cálculo da lei de controle e da entrada e saída filtradas
u(k)=(t0*uc(k)-s0*y(k)-s1*y(k-1)-r1*u(k-1))/r0; % Sinal de
controle
uf(k) = u(k) - am1*uf(k-1) - am2*uf(k-2);
yf(k) = y(k) - am1*yf(k-1) - am2*yf(k-2);
% Limite do sinal de controle
if u(k)>=4,
u(k)=4;](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-36-320.jpg)
![elseif u(k)<=-4,
u(k)=-4;
end
end
%% Sinais de Entrada e Saida do Processo;
figure(1)
subplot(211)
grid on
hold on
plot(uc,'k--')
%Subplot(312)
plot(y,'b')
legend('Sinal de referência (uc)','Sinal de saída (y)')
xlabel('Amostras')
title('Saída e Referência');
%xlim([0 100])
%% Sinal de Controle;
subplot(212)
stairs(u,'r')
grid on
legend('Sinal de controle (u)')
xlabel('Amostras')
title('Sinal de Controle');
%xlim([0 100])
%% Parâmetros a1 e a2 do Processo real e estimados;
figure(2)
subplot(221)
hold on
grid on
stairs(cont(1,:),'c','LineWidth',2)
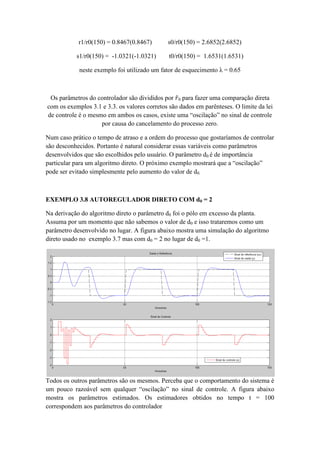
r1=0.8467*ones(1,N);
plot(r1,'k-.')
legend('r1/r0 estimado','r1/r0 real')
xlabel('Amostras')
title('Parâmetro r1/r0 estimado');
subplot(222)
hold on
grid on
stairs(cont(2,:),'r','LineWidth',2)
a2=2.6852*ones(1,N);
plot(a2,'k-.')
legend('s0/r0 estimado','s0/r0 real')
xlabel('Amostras')
title('Parâmetro s0/r0 estimado');
subplot(223)
hold on
grid on
stairs(cont(3,:),'b','LineWidth',2)
a3=-1.0321*ones(1,N);
plot(a3,'k-.')
legend('s1/r0 estimado','s1/r0 real')
xlabel('Amostras')
title('Parâmetro s1/r0 estimado');
subplot(224)
hold on
grid on
stairs(cont(4,:),'g','LineWidth',2)
a4=1.6531*ones(1,N);](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-37-320.jpg)
![%grid on
plot(a4,'k-.')
legend('t0/r0 estimado','t0/r0 real')
xlabel('Amostras')
title('Parâmetro t0/r0 estimado');
//////////////////////////////////////////////////////////////////////
//////////////////////EXEMPLO 3.10////////////////////////////////////
%Aluno:PEDRO JUNIOR
%Exercício 3.9
clear all
close all
clc
%% Função de transferencia
G=tf(1,[1 1 0]);
%Tempo de amostragem
h=0.5;
%Função de transferencia discretizada
Gd=c2d(G,h);
%Parametros da planta discretizada em forma de vetor
[Bd,Ad]=tfdata(Gd,'v');
%% Dados para o sistema em malha fechada
%Parametros usados para o sistema desejado em malha fechada
csi=0.5; %coeficiente de amortecimento
Wn=1.5; %frequencia natural
% Pólos discretos desejados
pdes=exp(-csi*Wn*h + j*Wn*sqrt(1-csi^2)*h);
P=[pdes conj(pdes)];
% Função de transferencia em malha fechada
Am=poly([pdes conj(pdes)]);
Bm1=[polyval(Am,1) 0];
% Sistema desejado em malha fechada discretizado
Gmd1=tf(Bm1,Am,h);
% Parâmetros da planta desejada em malha fechada em forma de vetor
[Bmd,Amd]=tfdata(Gmd1,'v');
%% Parametros para o encontrar o controlador
b0=Bd(2);
b1=Bd(3);
a1=Ad(2);
a2=Ad(3);
bm0=Bmd(2);
am1=Amd(2);
am2=Amd(3);
a0=0;
%% Beta
beta=(1+am1+am2)/(b0+b1);
%% Minha nova FT desejada em MF
Am=poly([pdes conj(pdes)]);](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-38-320.jpg)
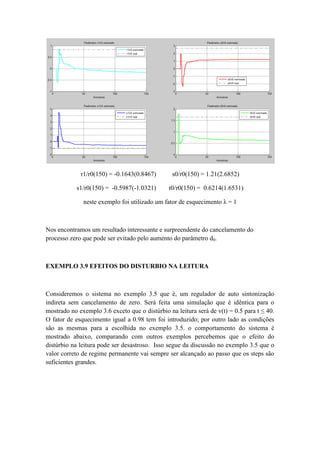
![Bm2=[beta*b0 beta*b1];
Gmd2=tf(Bm2,Am,h);
[Bmd2,Amd2]=tfdata(Gmd2,'v');
%% Valor de Entrada para a Onda Quadrada (uc);
N=input(' Entre com o numero de Interações?:');
%% Sinal de entrada Onda Quadrada;
j=0;
while j<N
for j=j+1:j+25
uc(j)=1;
end
for j=j+1:j+25
uc(j)=-1;
end
end
%% Condições iniciais necessários para o MQR
% Número de realizações
N = length(uc);
lambda = 0.98;%Fator de esquecimento
P0 = diag([100 100 1 1]); % Inicializar a matriz de covariância
Teta0 = [0 0 0.01 0.2]'; % Inicializar o vetor de parâmetros Teta
estimado
fi0=[0 0 0 0]';
yest=[0 0 0]';
diagP=diag(P0)';
%Número de parametros a serem estimados
Teta=[Teta0 Teta0 Teta0];
fi=[fi0 fi0 fi0];
%Comportamento da matriz de covariancia
diagP=[diagP; diagP; diagP];
P=P0;
cont=0*Teta;
y=0*yest;
u=0*yest;
erro=0*yest;
for k = 3:N
%% MQR
%Calcula a saída atual
y(k)=-a1*y(k-1)-a2*y(k-2)+b0*u(k-1)+b1*u(k-2); % Saída da planta
%Atualiza fi
fi(:,k-1)=[-y(k-1) -y(k-2) u(k-1) u(k-2)]';
%Calcula o erro de estimação
erro(k)=y(k)-fi(:,k-1)'*Teta(:,k-1);
%Calcula o vetor de ganhos
K=P*fi(:,k-1)/(lambda+fi(:,k-1)'*P*fi(:,k-1));
%Calcula o novo vetor de estimação de parâmetros
Teta(:,k)=Teta(:,k-1)+K*erro(k);
%Atualiza a matriz de covariância
P=(P-K*fi(:,k-1)'*P)/lambda;
diagP=[diagP; diag(P)'];
%Armazena parâmetros
a1est = Teta(1,k);
a2est = Teta(2,k);](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-39-320.jpg)
![b0est = Teta(3,k);
b1est = Teta(4,k);
%% Valores dos polinômios R, S e T
r1=((a0*am2)*(b0est^2)+(a2est-am2-a0*am1)*(b1est*b0est)+(a0+am1-
a1est)*(b1est^2))/(b1est^2-b1est*b0est*a1est+a2est*(b0est^2));
s0=((b1est*(a0*am1-a2est-am1*a1est+(a1est^2)+am2-
a1est*a0))/((b1est^2)-
b1est*b0est*a1est+a2est*(b0est^2)))+((b0est*(am1*a2est-a1est*a2est-
a0*am2+a0*a2est))/((b1est^2)-b1est*b0est*a1est+a2est*(b0est^2)));
s1=((b1est*(a1est*a2est-am1*a2est+a0*am2-a0*a2est))/((b1est^2)-
b1est*b0est*a1est+a2est*(b0est^2)))+((b0est*(a2est*am2-(a2est^2)-
a0*am2*a1est+a0*a2est*am1))/((b1est^2)-
b1est*b0est*a1est+a2est*(b0est^2)));
t0 = (1+am1+am2)/(b0est+b1est);
% Armazena parâmetros do controlador
cont(:,k)=[r1 s0 s1 t0]';
%% Cálculo da lei de controle
% Sinal de controle
u(k)=-r1*u(k-1)+t0*uc(k)-s0*y(k)-s1*y(k-1);
% Limite do sinal de controle
if u(k)>=4,
u(k)=4;
elseif u(k)<=-4,
u(k)=-4;
end
end
%% Sinais de Entrada e Saida do Processo;
figure(1)
subplot(211)
grid on
hold on
plot(uc,'k--')
%Subplot(312)
plot(y,'b')
legend('Sinal de referência (uc)','Sinal de saída (y)')
xlabel('Amostras')
title('Saída e Referência');
%xlim([0 100])
%% Sinal de Controle;
subplot(212)
stairs(u,'r')
grid on
legend('Sinal de controle (u)')
xlabel('Amostras')
title('Sinal de Controle');
%xlim([0 100])
%% Parâmetros a1 e a2 do Processo real e estimados;
figure(2)
subplot(211)
hold on
stairs(Teta(1,:),'c')
a1=-1.6065*ones(1,N);
plot(a1,'k-.')
stairs(Teta(2,:),'b')](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-40-320.jpg)
![a2=0.6065*ones(1,N);
grid on
plot(a2,'k--')
legend('a1 estimado','a1 real','a2 estimado','a2 real')
xlabel('Amostras')
ylabel('Amplitude')
title('Parâmetros a1 e a2 estimados');
%xlim([0 100])
%% Parâmetros b0 e b1 do Processo real e estimados;
subplot(212)
hold on
stairs(Teta(3,:),'g')
b0=0.1065*ones(1,N);
plot(b0,'k-.')
stairs(Teta(4,:),'r')
b1=0.0902*ones(1,N);
grid on
plot(b1,'k--')
legend('b0 estimado','b0 real','b1 estimado','b1 real')
xlabel('Amostras')
ylabel('Amplitude')
title('Parâmetros b0 e b1 estimados');
%xlim([0 100])
%% Parâmetros do controlador r1, s0, s1 e t0
figure(3)
subplot(221)
hold on
stairs(cont(1,:),'y','LineWidth',2)
r1=0.1111*ones(1,N);
grid on
plot(r1,'k-.')
legend('r1 estimado','r1 real')
xlabel('Amostras')
title('Parâmetro r1 do controlador');
subplot(222)
hold on
stairs(cont(2,:),'r','LineWidth',2)
a2=1.6422*ones(1,N);
grid on
plot(a2,'k-.')
legend('s0 estimado','s0 real')
xlabel('Amostras')
title('Parâmetro s0 do controlador');
subplot(223)
hold on
stairs(cont(3,:),'b','LineWidth',2)
a3=-0.7471*ones(1,N);
grid on
plot(a3,'k-.')
legend('s1 estimado','s1 real')
xlabel('Amostras')
title('Parâmetro s1 do controlador');
subplot(224)
hold on
stairs(cont(4,:),'g','LineWidth',2)
a4=0.8951*ones(1,N);
grid on
plot(a4,'k-.')
legend('t0 estimado','t0 real')](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-41-320.jpg)
![xlabel('Amostras')
title('Parâmetro t0 do controlador');
//////////////////////////////////////////////////////////////////////
//////////////////////PROBLEMAS: 3.6/ 3.7/ 3.9/ 3.11//////////////////
%% STR indireto usando MQR e MDPP
% Astrom & Wittenmark, Exemplo 3.4, p.104
% Prof. André Ferreira - 29/01/2014
%MODIFICADO POR PEDRO JUNIOR
clear all
close all
clc
%% Definição da planta
%g=tf(1,[1 1 0]); % Planta analógica
g=tf(1,[1 2 1]); % Planta analógica do problema 3.11
Ts=0.5; % Intervalo de amostragem
gd=c2d(g,Ts); % Planta discretizada
% Parâmetros da planta
[numd,dend]=tfdata(gd,'v');
b0=numd(2);
b1=numd(3);
a1=dend(2);
a2=dend(3);
%% Sistema em MF desejado
csi=0.7;
Wn=1;
% Pólos discretos desejados
pdes=exp(-csi*Wn*Ts + j*Wn*sqrt(1-csi^2)*Ts);
Pdes=[pdes conj(pdes)];
% FT desejada em MF
Am=poly([pdes conj(pdes)]);
Bm=[polyval(Am,1) 0]; % Escolhido para ter ganho DC unitário
gmd=tf(Bm,Am,Ts);
% Parâmetros da planta desejada em MF
[nummd,denmd]=tfdata(gmd,'v');
bm0=nummd(2);
am1=denmd(2);
am2=denmd(3);
%Polinômio A0:
a0=0; %Este parâmetro é sugerido no próprio livro
A0=tf([1 a0],[1],0.5);
%% Vetor de Entrada - Onda Quadrada (u)
uc = [];
neg=-1*ones(1,25);
pos=ones(1,25);
for i = 1:3](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-42-320.jpg)
![uc = [uc pos neg];
end
%% Condições iniciais necessários para o MQR
N = length(uc); % Número de realizações (medidas)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%
%lambda = 1;
%lambda = 0.85;
lambda = 0.65;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%
%P0 = diag([200 200 2 2]); % Inicializar a matriz de covariância *****
P0 = diag([100 100 1 1]); % Inicializar a matriz de covariância *****
%P0 = diag([50 50 0.5 0.5]); % Inicializar a matriz de covariância
*****
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%
Teta0 = [0 0 0.01 0.2]'; % Inicializar o vetor de parâmetros Teta
estimado *****
%Teta0 = [0 0 0.1 2]'; % Inicializar o vetor de parâmetros Teta
estimado *****
%Teta0 = [0 0 1 20]'; % Inicializar o vetor de parâmetros Teta
estimado *****
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%
fi0=[0 0 0 0]';
yest=[0 0 0]';
diagP=diag(P0)';
Teta=[Teta0 Teta0 Teta0];
fi=[fi0 fi0 fi0];
diagP=[diagP; diagP; diagP];
P=P0;
cont=0*Teta;
y=0*yest;
u=0*yest;
erro=0*yest;
for k = 4:N
%% MQR
% ----- Calcula a saída atual
y(k)=-a1*y(k-1)-a2*y(k-2)+b0*u(k-1)+b1*u(k-2); % Saída da
planta
% y(k)= -a1*y(k-2)-a2*y(k-3)+b0*u(k-1)+b1*u(k-2);
% ----- Atualiza Fi
fi(:,k-1)=[-y(k-1) -y(k-2) u(k-1) u(k-2)]';
% ----- Calcula o erro de estimação
erro(k)=y(k)-fi(:,k-1)'*Teta(:,k-1);
% ----- Calcula o vetor de ganhos
K=P*fi(:,k-1)/(lambda+fi(:,k-1)'*P*fi(:,k-1));
% ----- Calcula o novo vetor de estimação de parâmetros
Teta(:,k)=Teta(:,k-1)+K*erro(k);
% ----- Atualiza a matriz de covariância
P=(P-K*fi(:,k-1)'*P)/lambda;](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-43-320.jpg)
![diagP=[diagP; diag(P)'];
% ----- Armazena parâmetros
a1est = Teta(1,k);
a2est = Teta(2,k);
b0est = Teta(3,k);
b1est = Teta(4,k);
%Operador de Transferência:
%am1=Amq(2);
%am2=Amq(3);
beta=((1+am1+am2)/(b0est+b1est));
bm0=beta*b0est;
bm1=beta*b1est;
Hmq=tf([bm0 bm1],[1 am1 am2],0.5);
%% PASSO 2 - valores dos polinômios R, S e T
% r1 = b1est/b0est;
% s0 = (am1-a1est)/b0est;
% s1 = (am2-a2est)/b0est;
% t0 = bm0/b0est;
% cont(:,k)=[r1 s0 s1 t0]';
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%5
%Coeficientes r1, s1 e s0:
r1=((a0*am2*(b0est*b0est))+((a2est-am2-a0*am1)*(b1est*b0))+((a0+am1-
a1est)*(b1est*b1est)))/((b1est*b1est)-
(b1est*b0est*a1est)+(a2est*(b0est*b0est)));
s1=((a0*am2)-(a2est*r1))/(b1est);
s0=((am1+a0)-(r1+a1est))/(b0est);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Polinômios R, S e T:
R=tf([1 r1],1,0.5);
S=tf([s0 s1],1,0.5);
t0= beta*1;
t1= beta*a0;
T=tf([t0 t1],1,0.5);
cont(:,k)=[r1 s0 s1 t0]';
% %Polinômios R, S e T:
%R= tf([1 b1/b0],1,0.5); %tf([1 r1],1,0.5);
%S=tf([s0 s1],1,0.5);
%t0= beta*1;
%t1= beta*a0;
%T= tf([(bm0/b0) 0],1,0.5); %tf([t0 t1],1,0.5);
%% PASSO 3 - cálculo da lei de controle
u(k)=-r1*u(k-1) +t0*uc(k) -s0*y(k) -s1*y(k-1); % Sinal de controle
% Limite do sinal de controle
if u(k)>=4,
u(k)=4;
elseif u(k)<=-4,](https://image.slidesharecdn.com/exemplo3-160708131328/85/Reguladores-Auto-ajustaveis-SELF-TUNING-REGULATORS-44-320.jpg)


1. O documento apresenta resolução de exemplos sobre controle adaptativo de sistemas em tempo discreto e contínuo. 2. Inclui modelagem matemática de sistemas lineares e síntese de controladores PID e de dois graus de liberdade usando técnicas de cancelamento e não cancelamento de zeros. 3. Aborda exemplos de sistemas de segunda ordem, determinação de parâmetros de controle, equações de Diophantus e implementação de leis de controle.



































































