Baixado 47 vezes










![• Transformada Z inversa
𝑥[𝑛] = 𝒵−1{𝑋(𝑧)} =
1
2𝜋𝑗 𝐶
𝑋(𝑧)𝑧 𝑛−1 𝑑𝑧
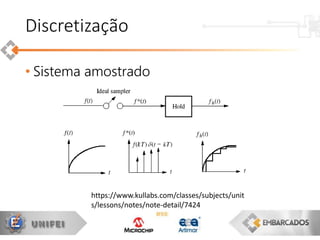
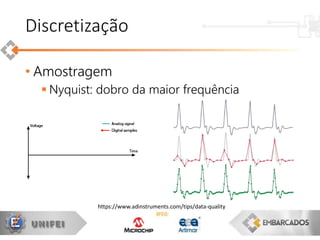
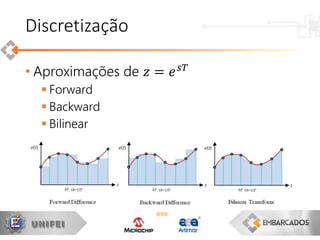
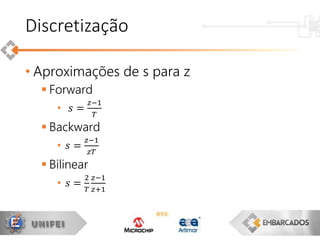
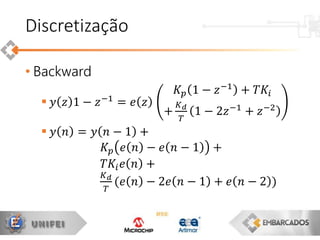
Discretização
•Frequência
discreta
•Tempo
discreto
•Frequência
contínua
•Tempo
contínuo
T S
ZN](https://image.slidesharecdn.com/pidvwebinarembartimar-171215125955/85/Webinar-Implementacao-de-Controle-PID-com-PIC16F1619-42-320.jpg)
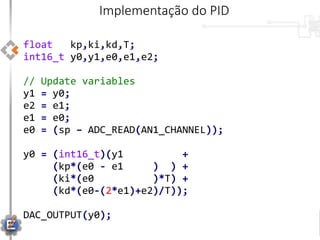

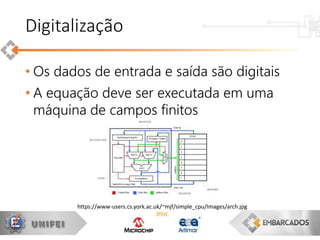
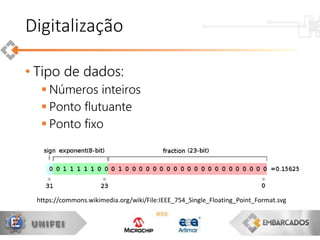
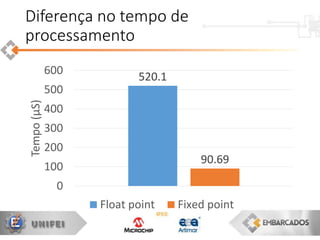
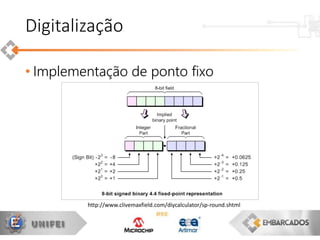
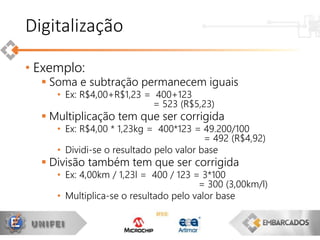

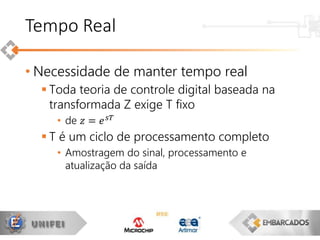


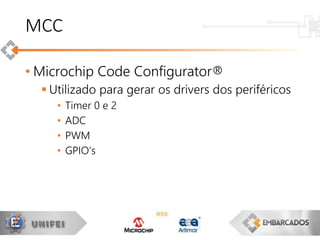
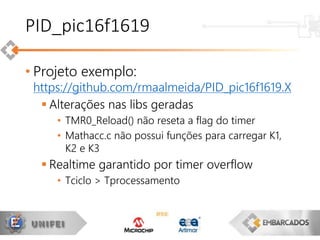
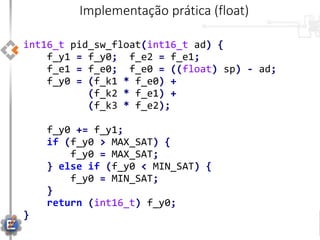
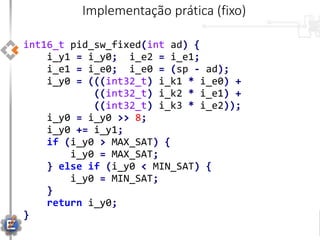
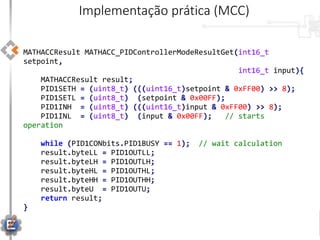
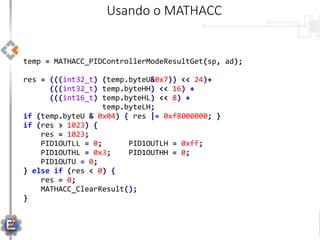
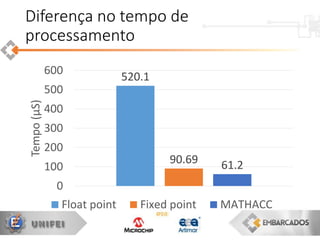
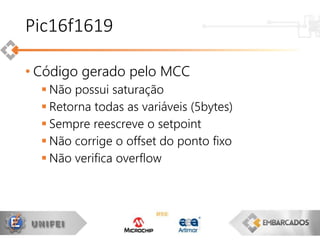
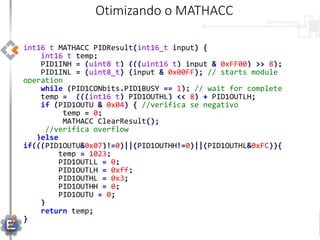
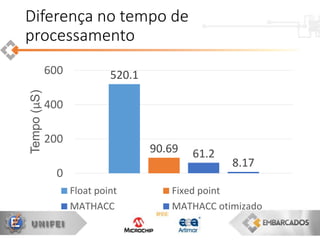

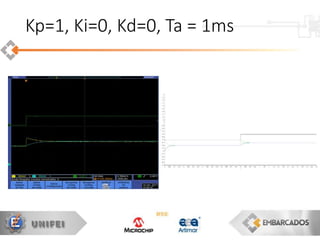


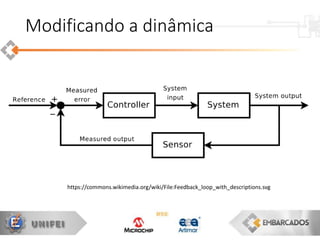
O documento apresenta uma visão geral sobre a implementação e teoria do controle PID, destacando as diferenças entre sistemas analógicos e digitais, além de discutir questões práticas e limitações do controlador PID. Ele aborda conceitos fundamentais como discretização, otimização de equações e processamento em tempo real, utilizando a plataforma PIC16F1619 para aplicação prática. Exemplos de implementações de código para PID em pontos flutuantes e fixos também são fornecidos.