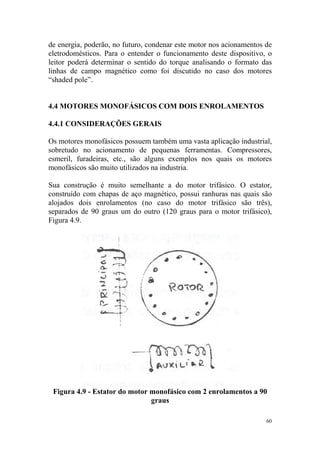
Este documento descreve os principais tipos de motores elétricos e fornece detalhes sobre o funcionamento e características dos motores trifásicos de indução, que representam a maior parte da potência instalada em motores. O documento explica o princípio do campo magnético giratório que causa o movimento do rotor e descreve os componentes, tipos de ligação, métodos de partida e outras especificações técnicas desses motores.

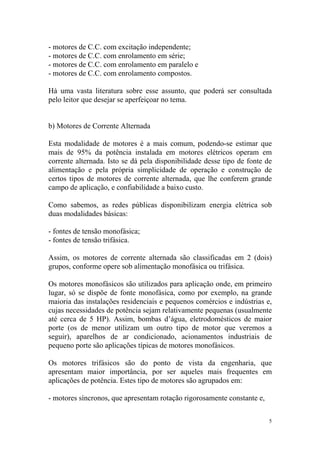









![3.5 CONJUGADO EM FUNÇÃO DE ROTAÇÃO
3.5.1 CONSIDERAÇÕES GERAIS
Os motores de indução trifásicos são assíncronos, isto é, podem operar
em uma faixa de rotação cujo limite superior é a velocidade síncrona (por
exemplo: 3600 rpm, para máquinas com um par de pólos). A cada rotação
está associado um valor de conjugado (torque, por exemplo em kgf x m).
Neste item vamos deduzir e analisar a curva de conjugado em função de
rotação.
3.5.2 CONJUGADO X ROTAÇÃO
Consideremos o espaço cilíndrico interno de um estator, sujeito a um
campo girante, conforme descrito anteriormente.
O efeito do estator, alimentado por um sistema trifásico, nesse espaço
→
cilíndrico, pode ser substituído pelo vetor campo girante B , cujo módulo
é BMAX, que gira com velocidade angular ωs.
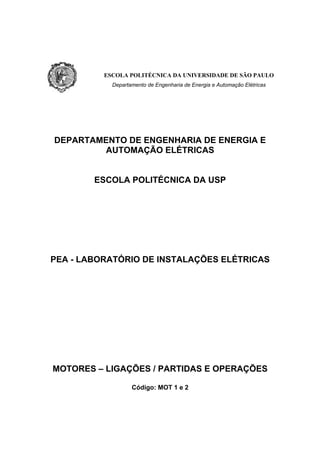
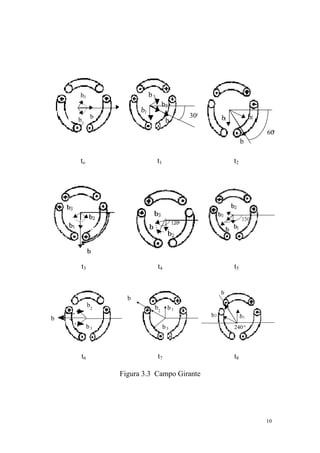
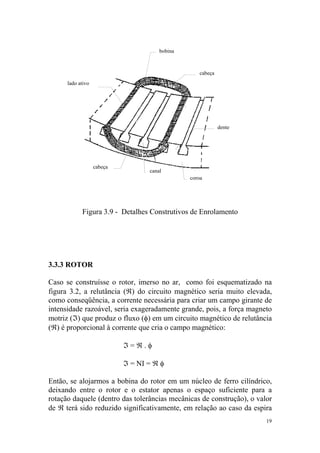
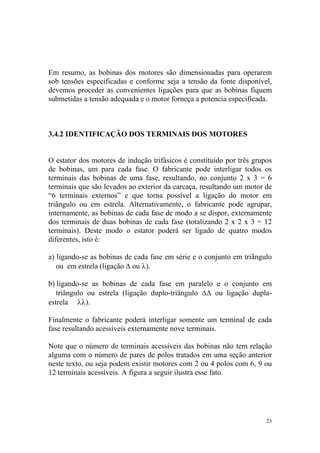
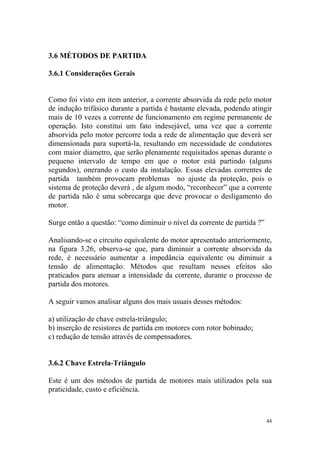
Colocando-se nesse espaço uma espira em curto circuito que pode girar
livremente, em torno de seu eixo longitudinal, coincidente com o eixo de
revolução do cilindro, o campo girante produzirá um fluxo concatenado
com a bobina, constituída por N espiras. Se a bobina girar com
velocidade angular ωr, a figura 3.19 apresenta a situação relativa do
campo girante e da bobina, em nos instantes t = 0 e t = t, sendo que:
a) o fluxo concatenado entre o campo B e a bobina será dado pela
expressão (I);
(I) φ(t) = NS BMAX cos [(ωs - ωr) t + θ]
φ(t) = φMAX cos[(ωs - ωr) t + θ]
onde:
N é o número de espiras da bobina
S é a área associada à bobinam por onde o fluxo de B se concatena
BMAX é o valor máximo do campo de indução
φMAX é NS BMAX, ou seja,o valor máximo de fluxo que pode ser
concatenado
29](https://image.slidesharecdn.com/motores-111030073043-phpapp01/85/Motores-29-320.jpg)
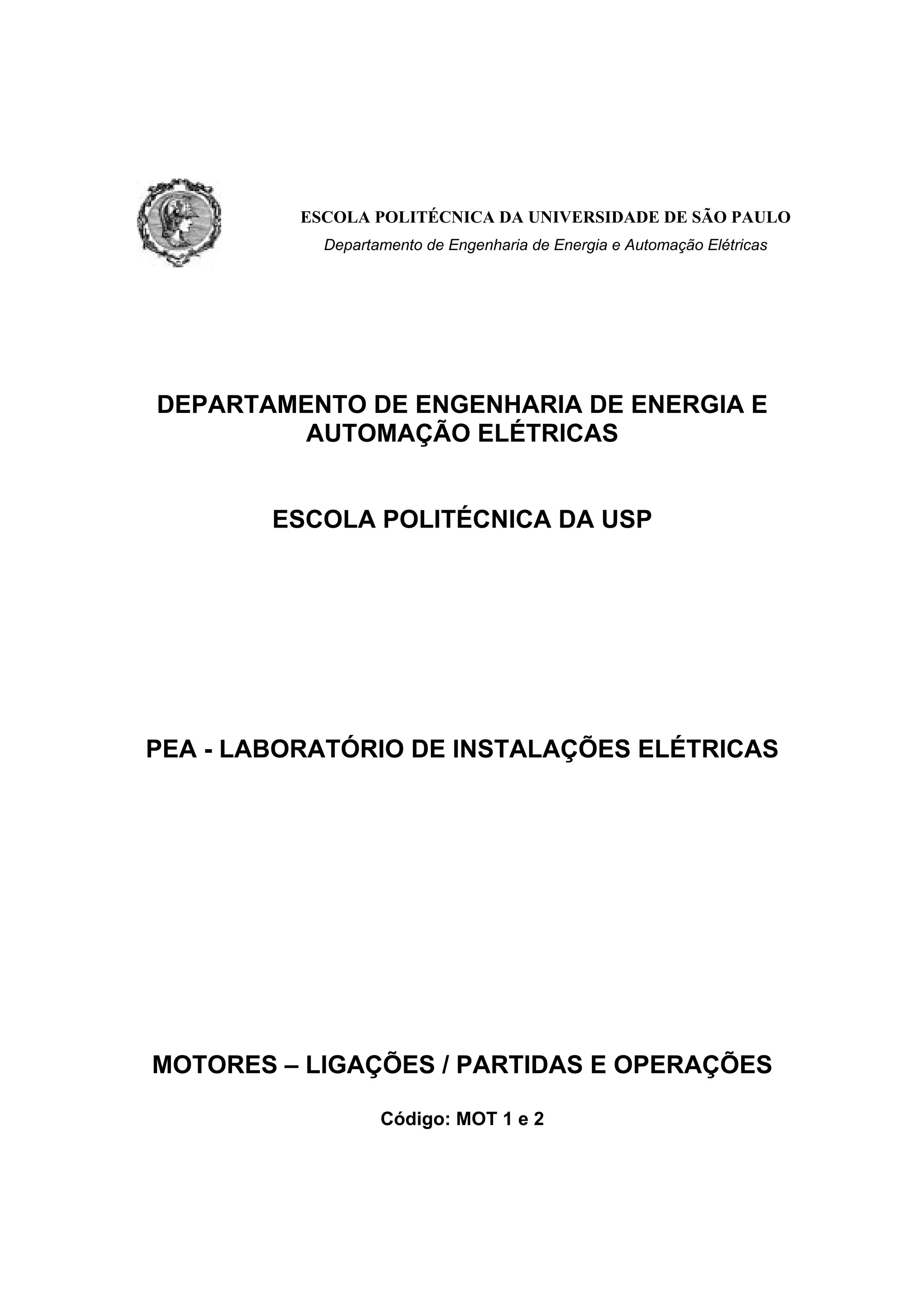
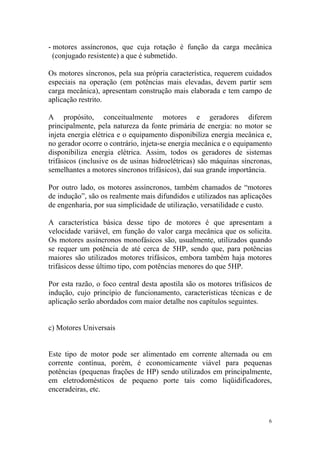
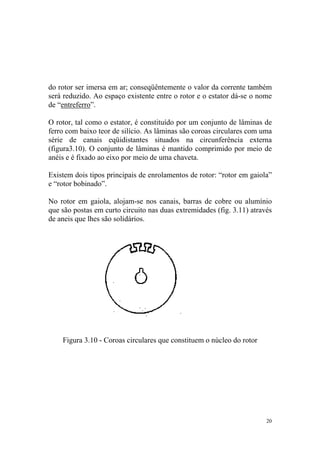
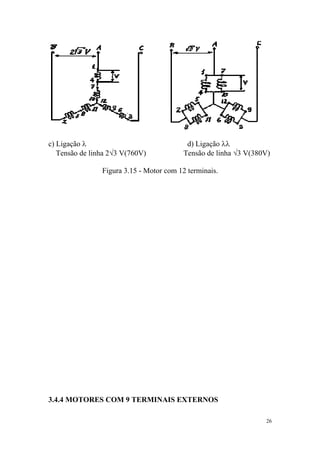
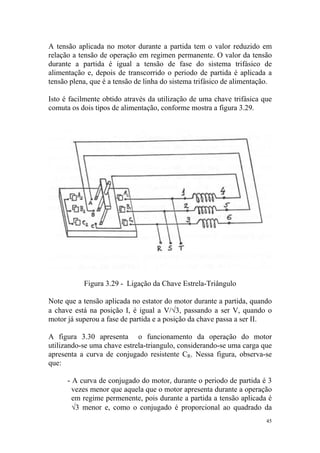
![b) Se ωs ≠ ωr, φ é variável no tempo havendo portanto uma f.e.m.
induzida na espira dada pela Lei de Lenz, expressa por (II);
(II) e(t) = - dφ(t)/dt = φMAX (ωs- ωr) sen [(ωs-ωr)t + θ]
Wst+θ
θ w rt
S F Fl
S
B
n
Fl
Fn
N Fn F
N
90°[(ws-wr)t +θ
t =0 t=t
Figura 3.19 - Posição relativa do campo girante e bobina
c) Como a bobina está em curto circuito esta f.e.m. provocará a circulação
de uma corrente i(t) na bobina, expressa por (II), onde Z é a
impedância da espira e ϕ é a defasagem entre tensão e corrente na
bobina (num circuito indutivo a corrente está atrasada em relação à
tensão, ver Nota (1)).
e( t ) ( ωs − ωr ) φmax
(III) i(t) = = sen [(ωs - ωr) t + θ’]
Z Z
onde: θ’ = θ - ϕ
ϕ é a defasagem entre tensão e corrente da bobina ou a “fase da
impedância Z”.
→
d) Ora, uma corrente i(t) imersa em um campo de indução B está sujeita a
uma força, cuja direção e sentido são dados pela “regra da mão
esquerda”) e, expressa por (IV).
30](https://image.slidesharecdn.com/motores-111030073043-phpapp01/85/Motores-30-320.jpg)
![(IV) F = B i(t) l, onde l é o comprimento da bobina
( ωs − ωr ) φmax
F = B. l sen [(ωs - ωr) t + θ’]
Z
__________________________________________________________
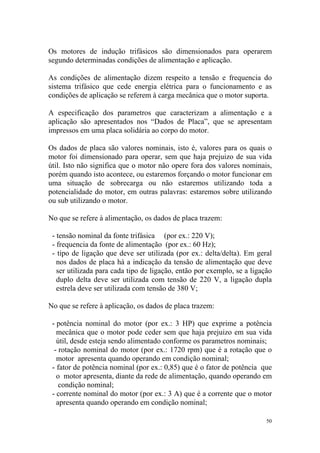
NOTA (1):
Num circuito de corrente alternada as correntes e tensões são expressas por funções senoidais do tipo
v(t) = VMAX (sen wt + α)
i(t) = IMAX (sen wt + α - ϕ)
onde a velocidade angular ω é propocional a freqüência (ω = 2πf) da rede, sendo no caso brasileiro
igual a 377 rd/s (ou seja, 2 x 3,1416 x 60 Hz) e, α é a fase inicial da tensão e ϕ é a defasagem entre
tensão e corrente. A figura abaixo ilustra a tensão e a corrente de um circuito indutivo, onde a corrente
esta atrasada em relação a tensão, ou seja, primeiro ocorre o máximo de tensão e depois de ϕ/ω
segundos ocorre o máximo de corrente. Diz-se nessas condições que a corrente está atrasada de um
ângulo de ϕ radianos em relação à tensão.
e
e
i
i
ϕ t
ϕ t
No caso que estamos analisando, a fase da tensão induzida na bobina é: (ωs - ωr)t + θ, pois a
freqüência de tensão induzida é a diferença entre freqüência síncrona (do estator) e a freqüência
(rotação) do rotor. (Para visualizar este fato, basta considerar o caso onde a espira está parada em
relação ao estator (a freqüência seria ωs ou está a girando com rotação igual ao do campo girante que é
a freqüência síncrona (a freqüência séria 0).
Considerando que o circuito é indutivo e a defasagem seja ϕ; a fase de corrente será:
[(ωs - ωr) t + θ - ϕ] ou [(ωs -ωr) + θ’]
Lembramos que a impedância Z de um circuito de uma bobina real (ou seja, que alem da indutância
também encerra a resistência do condutor que a constitui) é dada por Z = R + j ω L, cujo módulo é
•
Z = R 2 + ( ωL ) 2 e a defasagem ϕ entre a tensão e a corrente nesse bipolo é a fase do vetor Z , ou
seja, tg ϕ = ωL / R.
No caso da nossa bobina em que a freqüência é (ωs - ωr, fica: Z = R 2 + ( ωs − ωL ) 2 onde R é a
resistência do condutor que constitue o rotor e L é a indutância do rotor e, tg ϕ = (ωs - ωr)L / R.
e) Evidentemente a componente dessa força que nos interessa (que realiza
trabalho) é a projeção normal ao plano da bobina, FN, pois aquela
31](https://image.slidesharecdn.com/motores-111030073043-phpapp01/85/Motores-31-320.jpg)
![pertencente a esse plano, só tende deformar a espira. O módulo de FN é
expresso por (V) e o conjugado dela resultante por (VI).
(V) FN = F sen [(ωs - ωr) t + θ]
C = 2R . FN, onde R é a metade da largura da espira
C = 2R B.l. (ωs-ωr) φMAX/Z {sen [(ωs-ωr) t + θ’] . sen [(ωs-ωr) t + θ]}
como: sen α sen β = ½ [cos (α - β) - cos (α + β)] e, 2R B l = φMAX
(VI) C = [φ2MAX/Z] (ωs-ωr) [cos (θ - θ’ - cos [2(ωs-ωr) t + θ + θ’]
f) Note que há 2 parcelas que constituem a expressão do conjugado,
sendo que uma é pulsante, portanto com valor médio nulo, não
contribuindo para o valor do conjugado médio que realiza trabalho,
portanto a expressão do conjugado fica:
C = φ2max/Z (ωs - ωr) cos (θ - θ’)
como: ϕ = θ - θ’ : defasagem entre tensão e corrente do rotor
ωr = s ωs : onde s é o escorregamento do rotor em relação ao
campo girante
Z = R + s. ω . L : onde Z, R e L são respectivamente a
2
s
impedância, a resistência e a indutância
do rotor, vem que: onde X = ωs L
R
cos ϕ =
R 2 + s2 X 2
sR
então: C = ωs φ2max
R + s2 X 2
2
e ainda como φmax, que é o fluxo máximo criado pelo estator, é
proporcional ao quadrado da tensão de alimentação V2 (ver NOTA
(2))
sR
C = K V2
R + s2 X 2
2
___________________________________________________
NOTA (2):
Considere uma bobina com N espiras, sujeita a um fluxo concatenado φ, que varia com o tempo.
A tensão induzida será: V = N (dφ/dt) ou φ = 1/N ∫vdt = 1/N∫ VMAX cos ωt dt
φ = 1/ωN ∫ VMAX cos ωt d (ωt) φ = -1/ωN VMAX sen ωt = φMAX sen ωt
onde φMAX = 1/ωN VMAX ou φMAX = K VMAX
32](https://image.slidesharecdn.com/motores-111030073043-phpapp01/85/Motores-32-320.jpg)




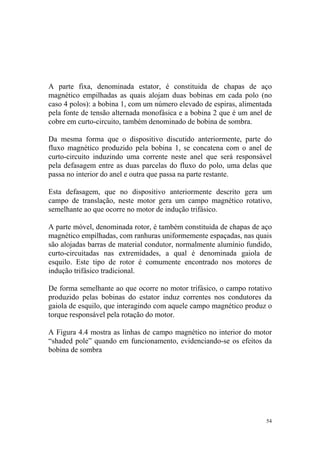
![Note que em motores com rotor do tipo “gaiola”, não é possível alterar a
resistência do rotor (a menos, evidentemente quando está sendo projetado
e construído). Porém, os motores do tipo “rotor bobinado” oferecem
acesso aos enrolamentos do rotor, através de anéis que giram solidários
ao eixo, acoplados a escovas fixas na carcaça. Nestes motores é possível
inserir resistores no circuito do rotor, permitindo deslocamentos da
rotação onde o conjugado máximo ocorre.
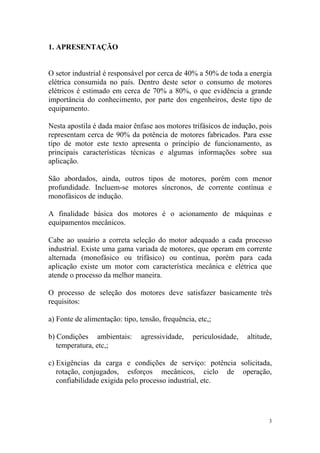
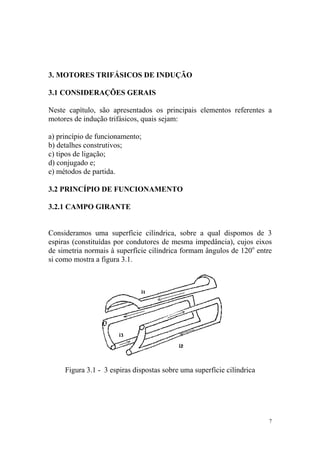
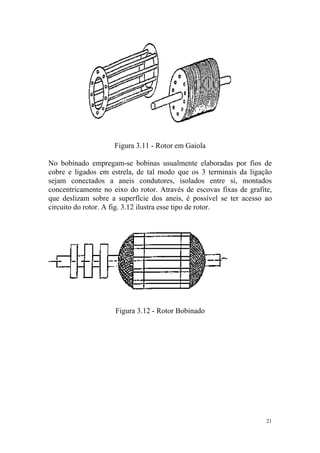
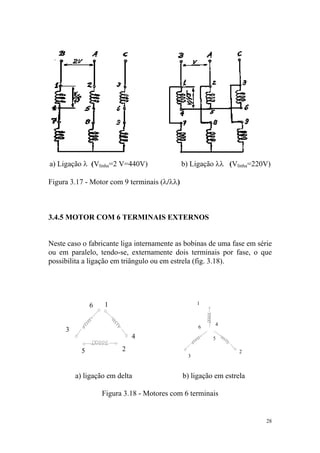
d) Influência de Tensão
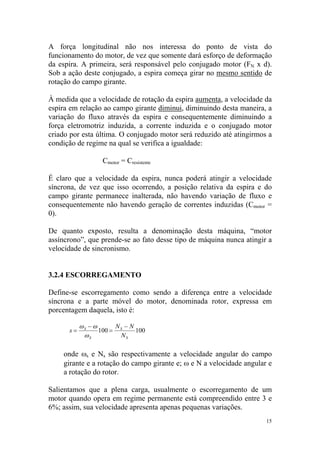
O conjugado varia com o quadrado de tensão de alimentação do estator,
como se pode observar na sua própria expressão. Assim, é possível
aumentar ou diminuir o conjugado de um motor, em particular o
conjugado máximo, variando-se a tensão de suprimento, conforme mostra
a figura 3.23.
KV 2 INFLUÊNCIA DA
X TENSÃO
V
V V 2
K[ ]
3 KV 2
3 =
X 3X
Figura 3.23 - Influência da Tensão de Alimentação (no estator)
Note que, quando se utiliza ligação delta ao invés de estrela, a tensão a
qual os enrolamentos do estator ficam submetidos é √3 vezes a tensão,
quando se utiliza a ligação estrela. Portanto, a utilização da ligação delta
resulta em conjugado 3 vezes maior do que a da estrela.
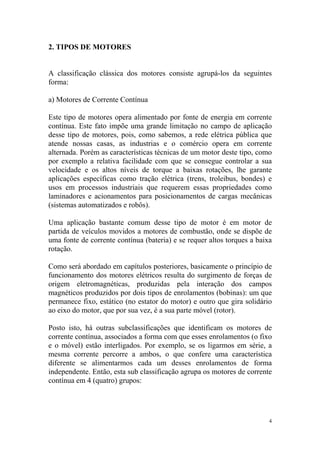
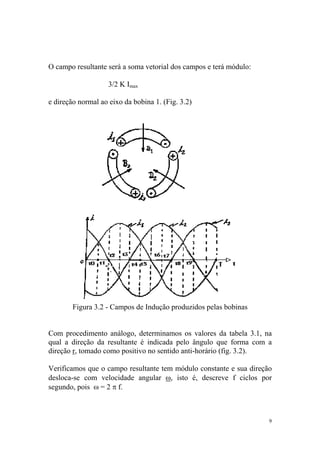
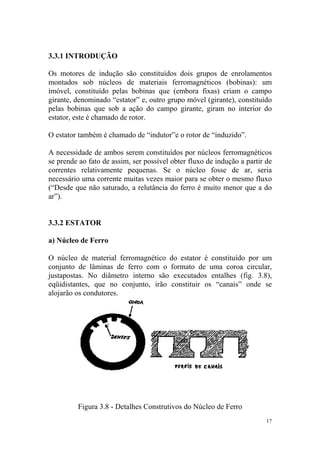
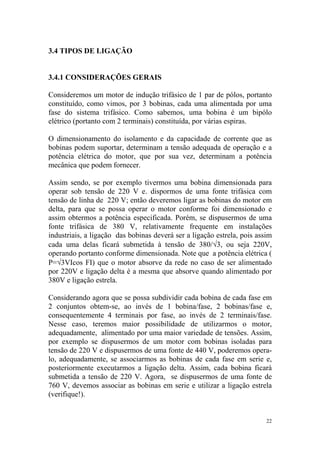
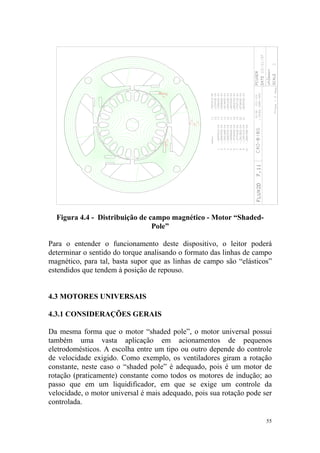
e) Curvas de Conjugado Motor x Resistente
Conforme seja a natureza de carga mecânica, haverá uma curva de
conjugado resistente associada.
38](https://image.slidesharecdn.com/motores-111030073043-phpapp01/85/Motores-38-320.jpg)
![Em cargas de ventilação, o conjugado resistente é proporcional ao
quadrado da velocidade enquanto que em guindastes, talhas e pontes
rolantes, o conjugado resistente é praticamente constante, havendo apenas
um pequeno sobretorque na região próxima do repouso. A figura 3.24
ilustra esse fato.
Conjugado
acelerante
Pto de
operação
N(rpm)
Figura 3.24 - Conjugado Acelerante
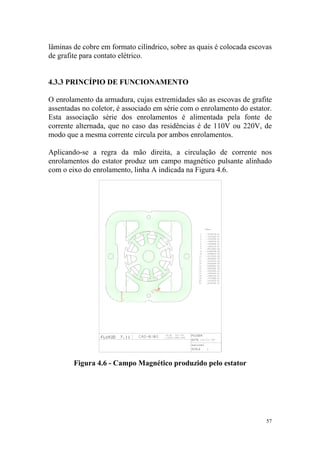
3.5.4 CORRENTE ABSORVIDA DA REDE DE ALIMENTAÇÃO
A dedução da expressão da corrente absorvida por um motor será
realizada calculando-se inicialmente a corrente no rotor para
posteriormente, lançando-se mão de analogia, com os transformadores,
calcular a corrente no estator:
a) Corrente no rotor
A corrente que circula no rotor é uma corrente senoidal, com freqüência
igual a diferença entre a velocidade síncrona (ωs) e a rotação do rotor
(ωr).
A intensidade dessa corrente, considerando uma espira no rotor, é dada
pela relação entre a tensão induzida no rotor, pelo estator, {e = - dφ/dt =
φMAX (ωs - ωr) sen [(ωs - ωr) t + 0} e a impedância do rotor, (com
resistência R e indutância X ; ver NOTA (3)), e terá módulo igual a: Z =
R 2 + s2 X 2 , portanto:
emax.sen[ s. ωs. t + θ]
(I) irotor(t) =
R 2 + s2 X 2
39](https://image.slidesharecdn.com/motores-111030073043-phpapp01/85/Motores-39-320.jpg)



































![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)































