Baixado 162 vezes


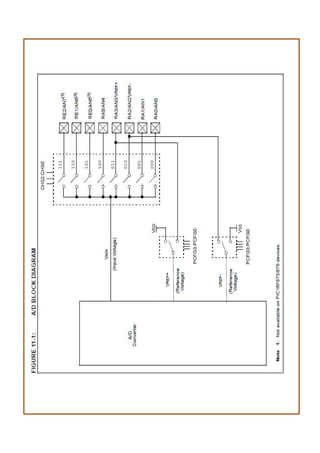
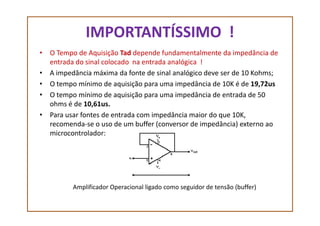
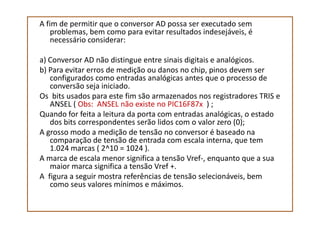
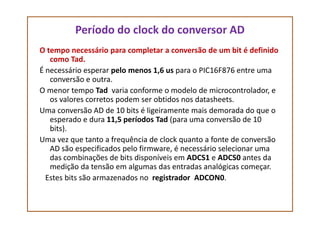
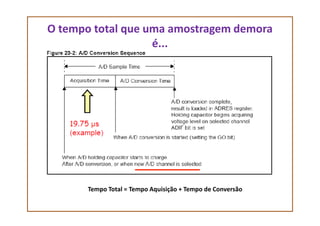
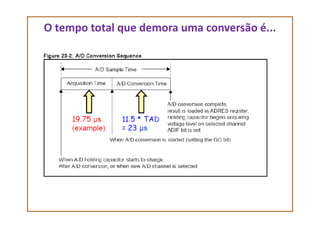
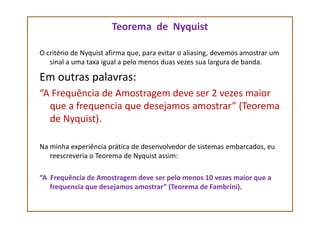
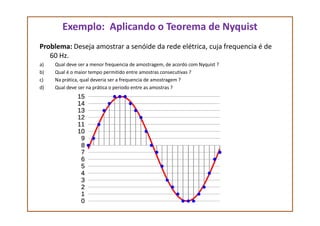
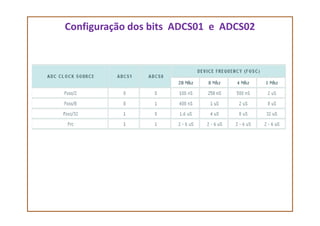
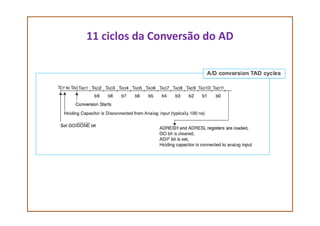
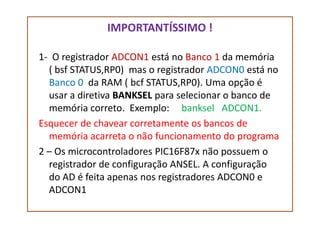
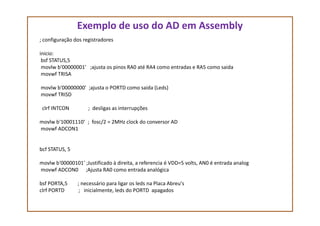
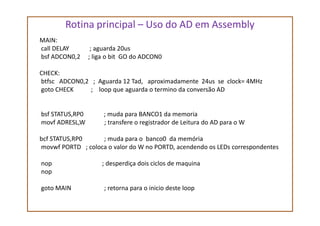
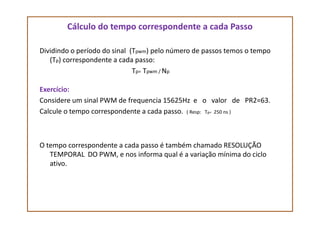
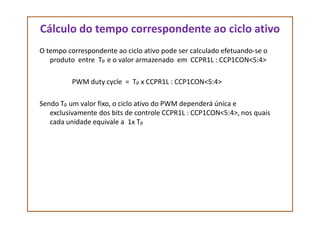
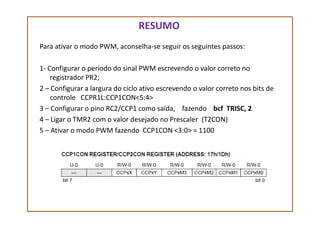
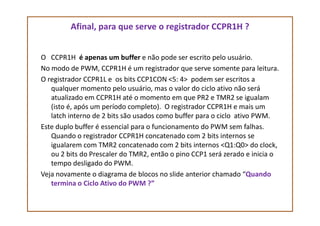

O documento discute o funcionamento dos conversores analógico/digital (A/D) em microcontroladores PIC, enfatizando a conversão de tensões analógicas para valores digitais e detalhando configurações dos registradores e processos de leitura. O texto aborda a importância da resolução em bits e apresenta exemplos práticos de configuração e uso do A/D em assembly e linguagem C. Além disso, traz considerações sobre a impedância de entrada, tempo de aquisição e o teorema de Nyquist para amostragem de sinais.






























































