Baixar para ler offline
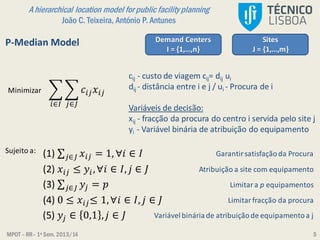
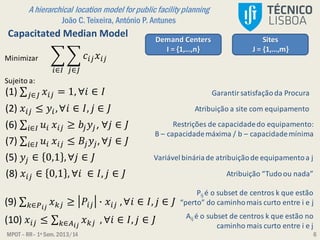
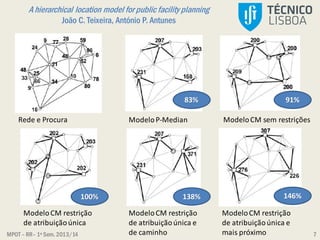
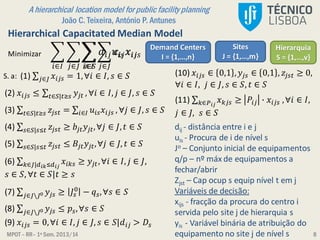


O documento apresenta um modelo hierárquico de localização para o planejamento de equipamentos públicos, focando na maximização da acessibilidade e na minimização de custos. O modelo é aplicado ao redesenho da rede de escolas primárias em Coimbra, levando em consideração a demanda e a capacidade dos equipamentos. As principais características incluem múltiplos níveis de demanda, uma hierarquia de equipamentos e restrições de capacidade e atribuição.















































