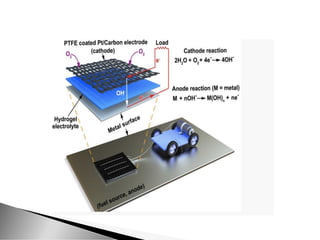
O documento discute os principais conceitos da robótica avançada, incluindo a automatização de máquinas, sensores, manipuladores, atuadores e sistemas de controle. Também aborda o desenvolvimento de uma técnica que permite que robôs produzam sua própria energia a partir de metais no ambiente.




























![Manual 0620[1]](https://cdn.slidesharecdn.com/ss_thumbnails/manual06201-220208090806-thumbnail.jpg?width=640&height=640&fit=bounds)