Transferir como PDF, PPTX

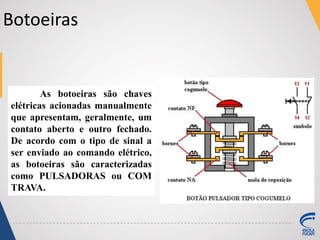
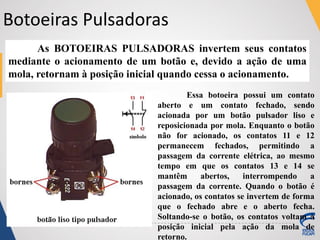
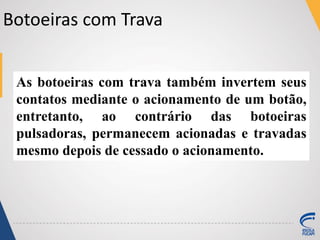
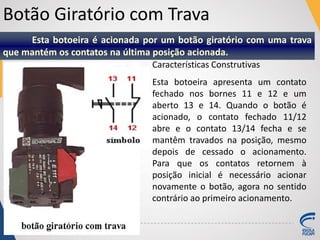
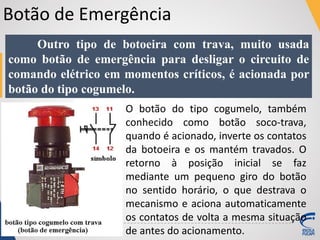
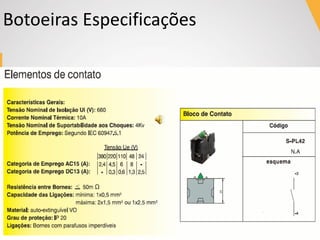
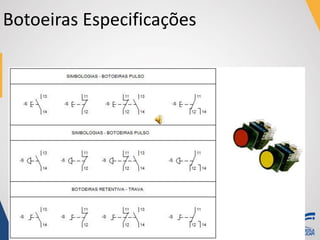
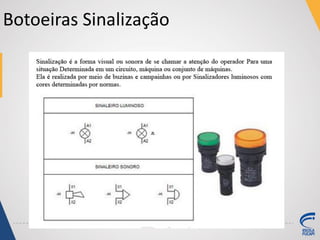
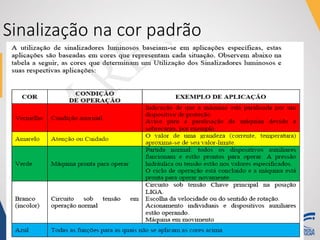

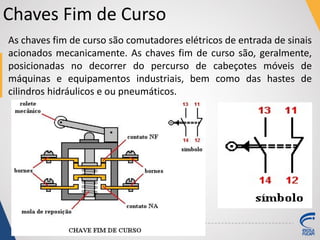
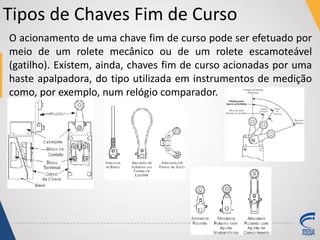
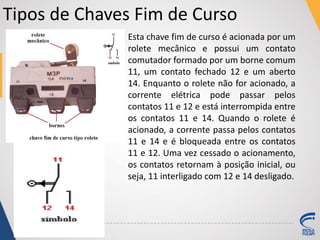
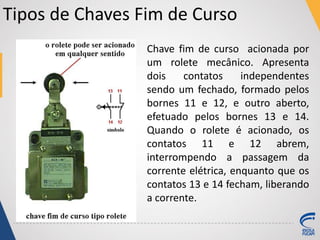
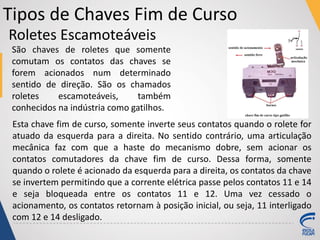


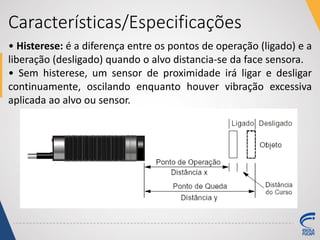


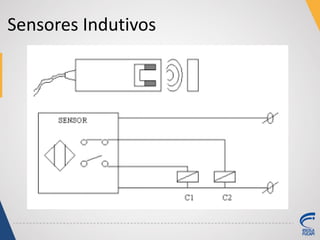
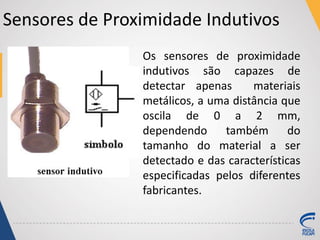
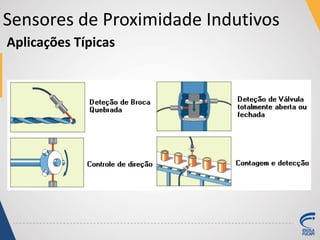

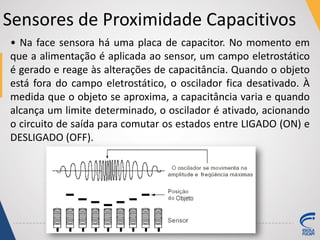
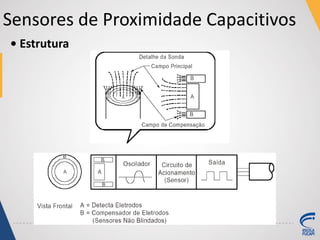
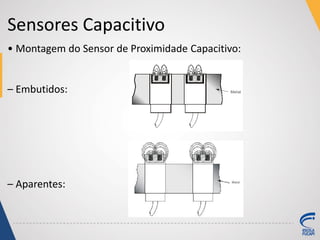
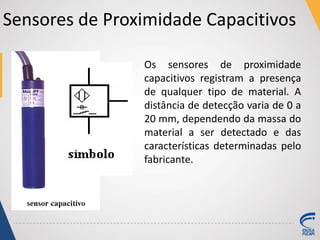
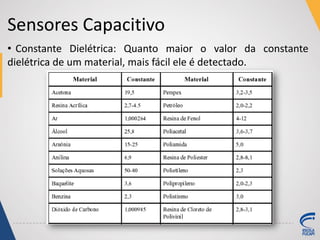
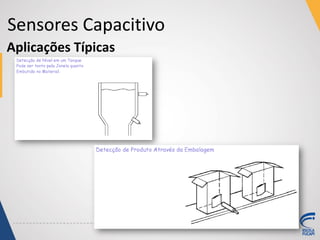


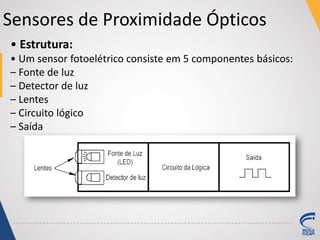
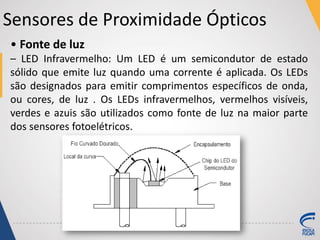
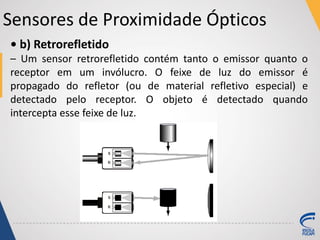
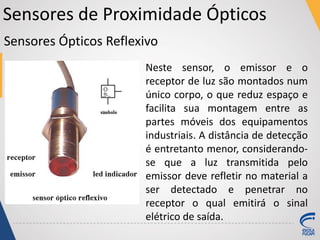
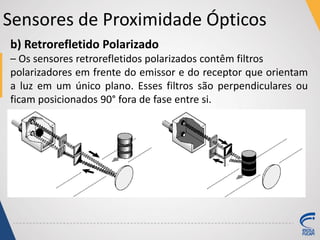
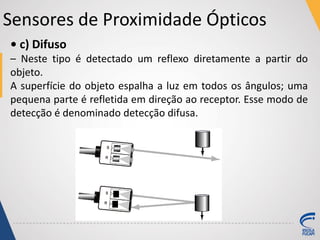
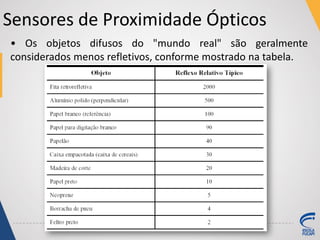
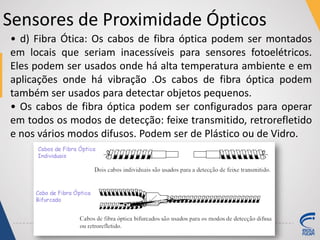
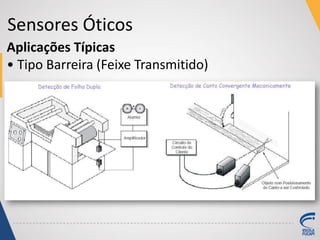
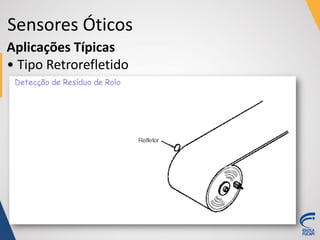

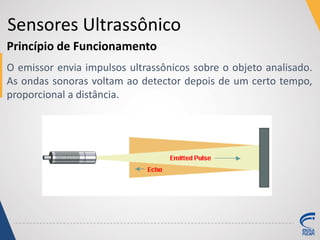
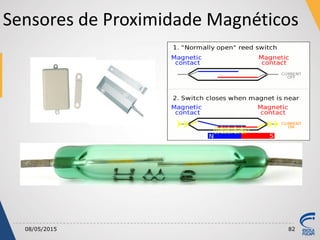












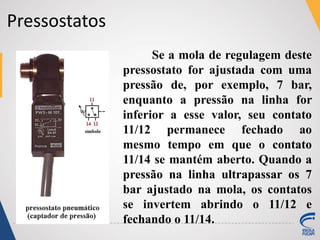



Este documento discute diferentes tipos de elementos de entrada de sinais elétricos utilizados em circuitos industriais, como botoeiras, chaves fim de curso, sensores de proximidade e pressostatos. Detalha as características e aplicações de botoeiras pulsadoras e com trava, chaves fim de curso acionadas por roletes mecânicos e escamoteáveis, e sensores de proximidade indutivos, capacitivos e ópticos.
![[E-BOOK 1] - Comandos Elétricos 1.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book1-comandoseltricos1-230731223144-ae158a59-thumbnail.jpg?width=640&height=640&fit=bounds)

![[E-BOOK 2] - Comandos Elétricos 2.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book2-comandoseltricos2-230731223144-16085388-thumbnail.jpg?width=640&height=640&fit=bounds)
![[E-BOOK 3] - Comandos Elétricos 3.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book3-comandoseltricos3-230731223143-b56b455f-thumbnail.jpg?width=640&height=640&fit=bounds)































































