Estudo orientado de circuitos com motor dc programados em S4A
•
1 gostou•1,952 visualizações

http://arduinoescola.blogspot.pt/2016/03/motores-dc-arduino-e-s4a-estudo.html

Recomendados
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a Estudo orientado de circuitos com motor dc programados em S4A
Semelhante a Estudo orientado de circuitos com motor dc programados em S4A (20)
Mais de Ana Carneirinho
Mais de Ana Carneirinho (20)
Último
Último (20)
Estudo orientado de circuitos com motor dc programados em S4A
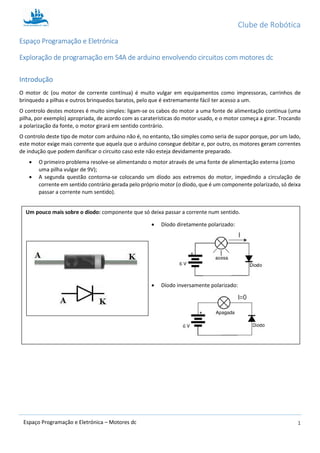
- 1. Clube de Robótica 1Espaço Programação e Eletrónica – Motores dc Espaço Programação e Eletrónica Motores dc em circuitos com arduino programado em S4A – estudo orientado Introdução O motor dc (ou motor de corrente contínua) é muito vulgar em equipamentos como impressoras, carrinhos de brinquedo a pilhas e outros brinquedos baratos, pelo que é extremamente fácil ter acesso a um. O controlo destes motores é muito simples: ligam-se os cabos do motor a uma fonte de alimentação contínua (uma pilha, por exemplo) apropriada, de acordo com as caraterísticas do motor usado, e o motor começa a girar. Trocando a polarização da fonte, o motor girará em sentido contrário. O controlo deste tipo de motor com arduino não é, no entanto, tão simples como seria de supor porque, por um lado, este motor exige mais corrente que aquela que o arduino consegue debitar e, por outro, os motores geram correntes de indução que podem danificar o circuito caso este não esteja devidamente preparado. O primeiro problema resolve-se alimentando o motor através de uma fonte de alimentação externa (como uma pilha vulgar de 9V); A segunda questão contorna-se colocando um díodo aos extremos do motor, impedindo a circulação de corrente em sentido contrário gerada pelo próprio motor (o díodo, que é um componente polarizado, só deixa passar a corrente num sentido). Um pouco mais sobre o díodo: componente que só deixa passar a corrente num sentido. Díodo diretamente polarizado: Díodo inversamente polarizado:
- 2. Clube de Robótica 2Espaço Programação e Eletrónica – Motores dc O controlo de motor começará por ser feito através de um transístor bipolar, cuja base será ligada a uma saída PWM do arduino. Um pouco mais sobre o transístor bipolar: A sua função é permitir a passagem de corrente entre dois pinos (coletor e emissor) quando um terceiro (base) é ativado. O funcionamento de um transístor pode ser comparado ao de uma torneira de monocomando que, ao ser aberta, deixa passar a água sempre num único sentido. Funcionamento de um transístor bipolar: TIP 120: Como transístor, será usado o TIP 120 que, na realidade, é composto por dois transístores (numa configuração chamada Darlington). Seguem a pinagem e o circuito equivalente deste componente.
- 3. Clube de Robótica 3Espaço Programação e Eletrónica – Motores dc Exercício 1 – Funcionamento básico do motor dc Objetivo: Controlar a velocidade de um motor dc através de uma saída PWM. Material a utilizar: Arduino, breadboard, Motor dc, 1 resistências 220 Ω, 1 resistência 10 kΩ, TIP 120, um díodo 1N4007, fonte de alimentação externa (pilha), resistência variável 10 kΩ, interruptor de pressão, fios. Entradas / saídas do Arduino a utilizar: 1 saída PWM, 1 entrada digital, 1 entrada analógica 1.1. Efetuar a seguinte ligação: 1.1.1. No S4A, alterar o valor da saída D9 para vários valores entre 0 e 255. O que se observa? 1.1.2. Acrescentar ao circuito anterior uma resistência variável, ligá-la a uma entrada analógica, e controlar a partir dessa resistência a velocidade do motor. 1.1.3. Acrescentar ao circuito montado em 1.1.2. um botão de pressão, de forma a que o motor só rode se o botão estiver premido. 1.1.4. Alterar o programa anterior de forma a ligar o motor premindo o botão de pressão; nova atuação no botão, deve desligar o motor. 1.1.5. Se se trocar a posição dos fios do motor, invertendo a sua polarização, o que se observa?
- 4. Clube de Robótica 4Espaço Programação e Eletrónica – Motores dc Exercício 2 – Utilizar o driver L293D para controlar o motor dc Objetivo: Controlar o sentido de rotação do motor dc através do driver L293D. Material a utilizar: Arduino, breadboard, Motor dc, L293D, 2 resistências 10 kΩ, 2 botões de pressão, fios. Entradas / saídas do Arduino a utilizar: 2 entradas digitais, 2 saídas PWM 2.1. Efetuar a seguinte ligação, ligando os pinos 2 e 7 às entradas digitais PWM 6 e 9. Um pouco mais sobre o driver L293D: À medida se constrói circuitos mais complicados, é aconselhável começar a utilizar circuitos integrados (CI), que mais não são que circuitos miniaturizados e encapsulados, “prontos a utilizar”. Para saber o que faz um CI, há que identificá-lo a partir da sua referência e procurar a sua datasheet (documento que apresenta de forma resumida todos os seus dados e características) internet. No caso do L293D, e de acordo com a sua datasheet (http://www.ti.com/lit/ds/symlink/l293.pdf) a sua pinagem é a seguinte: O seu circuito interno permite o controlo de vários tipos e número de motores. No nosso caso, controlaremos apenas a direção de 1 motor dc, mas é possível encontrar muitos outros circuitos que apliquem este integrado.
- 5. Clube de Robótica 5Espaço Programação e Eletrónica – Motores dc 2.2. Acrescentar ao circuito anterior dois botões de pressão e ligá-los às entradas digitais D2 e D3. 2.3. Programar o circuito de forma a que o motor rode para um lado quando se usa um dos interruptores e que rode para outro quando se usa o segundo interruptor. Premir duas vezes o mesmo interruptor, deve fazer parar o motor. Premindo os dois botões em simultâneo deve também fazer parar o motor. ----------------------------------------------------------------------------------------------------------------------------------------------------------- Algumas soluções: 1.1.1. O motor adquire vários valores de velocidade. 1.1.2. 1.1.3. 1.1.4. 1.1.5. O motor inverte o sentido de rotação
- 6. Clube de Robótica 6Espaço Programação e Eletrónica – Motores dc 2.3