
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a Aula 15 - Posições relativas entre duas retas.ppt
Semelhante a Aula 15 - Posições relativas entre duas retas.ppt (20)
Aula 15 - Posições relativas entre duas retas.ppt
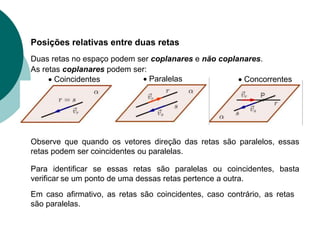
- 1. Posições relativas entre duas retas Duas retas no espaço podem ser coplanares e não coplanares. Observe que quando os vetores direção das retas são paralelos, essas retas podem ser coincidentes ou paralelas. Coincidentes Paralelas Concorrentes As retas coplanares podem ser: Para identificar se essas retas são paralelas ou coincidentes, basta verificar se um ponto de uma dessas retas pertence a outra. Em caso afirmativo, as retas são coincidentes, caso contrário, as retas são paralelas.
- 2. As retas não coplanares são chamadas de reversas. Observe que quando os vetores direção das retas não são paralelos, essas retas podem ser concorrentes ou reversas. Concorrentes reversas Para identificar se essas retas são concorrentes ou reversas, basta verificar se os vetores SR e v , v s r , onde R e S são pontos das retas r e s, respectivamente, são coplanares, ou seja, Em caso afirmativo, as retas são concorrentes, caso contrário, as retas são reversas. 0 SR , v , v s r
- 3. Exemplo 1 Em cada item a seguir, determine a interseção das retas r e s. a) R t , t z t -1 y 2t - 2 x r 1 3 : 2 z 3 2 y 2 - x : s Solução: Você deve começar verificando a posição relativa das retas r e s. 1 , 3 , 2 vr 1 , 3 , 2 vs Observe que esses vetores são paralelos, assim essas retas são coincidentes ou paralelas. Considere um ponto da reta r, por exemplo, A(2,-1,1) e verifique se esse ponto pertence à reta s. (V) 1 1 1 Como essa substituição conduz a uma verdade, você pode concluir que o ponto A pertence à reta s. Logo, as retas r e s são coincidentes e 2 1 3 2 1 2 - 2 r s r
- 4. b) R t , t 1 z t 3 -1 y 2t - 2 x : r z 3 y 2 - x : s Solução: Você deve começar verificando a posição relativa das retas r e s. 1 , 3 , 2 vr 1 , 3 , 2 vs Observe que esses vetores são paralelos, assim essas retas são coincidentes ou paralelas. Considere um ponto da reta r, por exemplo, A(2,-1,1) e verifique se esse ponto pertence à reta s. (F) 1 3 1 1 Como essa substituição conduz a uma falsidade, você pode concluir que o ponto A não pertence à reta s. Logo, as retas r e s são paralelas e 1 3 1 2 - 2 s r
- 5. c) R t , t 1 z t 3 -1 y 2t - 2 x : r R h ), 0 , 1 , 1 ( h 2 , 2 , 0 X : s Solução: Você deve começar verificando a posição relativa das retas r e s. 1 , 3 , 2 vr 0 , 1 , 1 vs Observe que esses vetores não são paralelos, assim as retas r e s podem ser concorrentes ou reversas. Considere um ponto R da reta r e um ponto S da reta s, por exemplo: R(2,-1,1) e S(0,2,2). Daí, 1 , 3 , 2 SR Então, 1 3 2 0 1 1 1 3 2 SR , v , v s r 3 2 1 1 3 2 0 ) 3 0 2 ( 3 0 2 SR , v , v s r Logo as retas r e s são concorrentes em um ponto P.
- 6. Para calcular o ponto P, interseção de r e s, você pode escrever as equações paramétricas da reta s, igualar as coordenadas x, y e z e resolver o sistema em t e h obtido. R t , t 1 z t 3 -1 y 2t - 2 x : r R h ), 0 , 1 , 1 ( h 2 , 2 , 0 X : s R t , t z t -1 y 2t - 2 x r 1 3 : R h , z h 2 y h x s 2 : Então, 2 t h t 1 - h 2t - 2 1 2 3 1 t h 2 2 0 h Substituindo o valor de t em r ou,o valor de h em s, você obtém o ponto P(0,2,2). Logo, 2 , 2 , 0 s r
- 7. d) R t , t 1 z t 3 -1 y 2t - 2 x : r z y x : s Solução: Você deve começar verificando a posição relativa das retas r e s. 1 , 3 , 2 vr 1 , 1 , 1 vs Observe que esses vetores não são paralelos, assim as retas r e s podem ser concorrentes ou reversas. Considere um ponto R da reta r e um ponto S da reta s, por exemplo: R(2,-1,1) e S(3,3,3). Daí, Então, 2 4 1 1 1 1 1 3 2 SR , v , v s r 4 1 1 1 3 2 0 ) 6 8 1 ( 4 3 4 SR , v , v s r Daí, as retas r e s são reversas. 2 , 4 , 1 SR Logo, s r
- 8. Definição Se os vetores direção das retas r e s são ortogonais diz-se que essas retas são ortogonais. Retas ortogonais e concorrentes são chamadas perpendiculares. Exemplo 1 Determine a reta s que passa pelo ponto P(1,-2,-1) e é perpendicular à reta r dada a seguir. Solução: Comece observando que o ponto P não pertence à reta r, pois, z y 1 x : r (F) 1 2 1 1 Considere então que a reta s passa por P e é perpendicular à reta r no ponto C.Como o ponto C é um ponto da reta r, você pode escrever: z z z C , , 1 Assim, 0 PC vr 1 , 2 , ) 1 ( ), 2 ( , 1 1 z z z z z z PC 0 1 , 2 , 1 , 1 , 1 z z z 0 1 2 z z z 1 z 3 z 3 0 , 1 , 1 PC Daí, Observe que Logo, R h h X s ), 0 , 1 , 1 ( 1 , 2 , 1 :