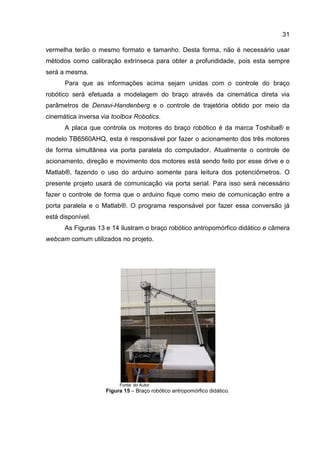
1. O documento descreve um projeto de pesquisa sobre visão computacional aplicada a um braço robótico antropomórfico didático.
2. O objetivo é fazer o reconhecimento de objetos usando um sistema de visão computacional para controlar a trajetória do braço robótico.
3. O sistema irá capturar imagens em tempo real, processá-las para extrair informações sobre o objeto e integrar com o controle do braço robótico.



![5
2 PROBLEMA
Os sistemas de visão computacional estão aos poucos conquistando seu
espaço em ambientes industriais [1]. O conceito de um sistema artificial de visão
possibilitar a execução das mesmas tarefas exercidas pelo olho humano é
certamente um grande avanço tecnológico. Uma definição apropriada para a técnica
de visão computacional, é que pode ser classificada como a ação de um
determinado atuador em função de imagens coletadas em tempo real e devidamente
processadas. A implantação desse tipo de sistema requer estudo e aplicação de
técnicas que abrangem desde a estrutura do local, principalmente no que se refere à
iluminação, aquisição e processamento de imagens, até o controle do atuador.
Mesmo com os avanços da visão computacional e com uma gama maior de
produtos industrializados é comum ver pessoas realizando inspeções em linhas de
produção principalmente em indústrias de pequeno e médio porte [1]. A inspeção
pode ter como objetivo aspectos diversos tais como: padrão de cores, tamanhos,
integridade dos objetos e muitas outros que dependerá do tipo do produto
inspecionado.
Quando realizada por humanos, a análise pode ser feita de forma não
estruturada. O olho humano tem alta capacidade de adaptação ao meio, reagindo
rapidamente às variações do ambiente, porém, ações humanas possuem limitações
físicas e psicológicas, como por exemplo, fadiga e falta de atenção, além dos riscos
elevados que alguns processos podem causar às vidas humanas. Por outro lado,
sistemas de visão artificial avaliam múltiplas características em alta velocidade e
podem ser inseridos em ambientes de risco. Geralmente estes necessitam de um
ambiente com condições controladas, como: iluminação conhecida, campo de visão,
ângulos de câmera e objetos de interesse do segmento.
O processo de inspeção é geralmente repetitivo e muitas vezes com produtos
complexos de serem analisados. Sendo assim, fazer a inspeção de forma
inadequada, ou até mesmo deixar de averiguar alguns itens da linha são falhas
gravíssimas no que diz respeito à produção [2].
Segundo [2], a inspeção humana mostra taxas de efetividade entre 80% e
90% e declinando rapidamente apenas meia hora após o início da jornada
de trabalho. Estes dados são apenas para verificação de um único tipo de
defeito.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-5-320.jpg)
![6
Fonte: [1]
Figura 1 - Processo de Inspeção não automatizada.
Outro grande desafio enfrentado em ambientes industriais é a quantidade de
sensores utilizados para um único processo. No caso de aplicações de manuseio de
materiais, a peça transportada deve ser apresentada a um robô com uma posição e
orientação conhecida pelo mesmo, dentro da célula de trabalho [3]. O uso de vários
sensores para o posicionamento correto do produto acaba gerando uma quantidade
elevada de variáveis a serem analisadas.
Pela dinâmica econômica atual é cada vez mais reduzido o ciclo de alteração
dos produtos industrializados, demandando linhas de produção capazes de serem
re-configuradas com agilidade. Nesse contexto o uso de sistemas de visão
computacional ganham ainda mais força.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-6-320.jpg)
![7
3 JUSTIFICATIVA
As aplicações que envolvem o uso de processamento de imagens estão
presentes em vários cenários, como: ambientes industriais, sistemas de segurança
para transporte e tecnologia médica. Em ambientes industriais os sistemas de visão
de máquina podem ser empregados em controle de qualidade de praticamente todos
os setores, desde monitores de computador até as superfícies de componentes de
transmissão para placas de circuito impresso para celulares [4].
Fonte: [4], traduzida pelo autor.
Figura 2 - Principais aplicações em visão computacional.
Em países como a Alemanha os investimentos e avanços no ramo da visão
computacional, mostram-se maiores que países do continente americano. A Figura 3
ilustra estatísticas de 2001 a 2011 sobre o volume de negócios em visão de máquina
na Alemanha.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-7-320.jpg)
![8
Fonte: [5], traduzida pelo autor.
Figura 3 - Volume de negócios em visão computacional na Alemanha ( Doméstico + Exportações).
A Figura 3 representa o volume de negócios de mais de três mil empresas em
70 segmentos industriais de sistemas de visão computacional doméstico e
exportações. A taxa de retorno de investimento de 2001 a 2011 representada pela
sigla CAGR (Compound Annual Growth Rate – Taxa Composta Anual de
Crescimento) foi de 8,5%. Dados estes levantados da entidade empresarial alemã
VDMA (Verband Deutscher Maschine und Anlagenbeu – Federação Alemã de
Engenharia). O Gráfico 4 mostra um crescimento do volume de negócios moderado
de 2011 para 2012 se comparado aos outros anos.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-8-320.jpg)
![9
Fonte: [5], traduzida pelo autor.
Figura 4 – Crescimento moderado no volume de negócios em visão computacional na Alemanha em
2012 (doméstico + exportações).
É possível notar que no ano de 2009 houve uma queda considerável do
volume de negócios, voltando a estabilizar no ano seguinte. Essa baixa se deve à
crise mundial enfrentada nesse período.
Segundo [6], o estudo de mercado mostra claramente que a indústria
europeia de visão de máquina tem visto uma recuperação muito forte após o
ano de crise de 2009. O volume de negócios do setor europeu de visão de
máquina cresceu 35% em 2010.
Uma comparação relacionando o crescimento no volume de negócios em
visão de máquina entre todos os continentes é ilustrada na Figura 5.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-9-320.jpg)
![10
Fonte: [5], traduzida pelo autor.
Figura 5 – Comparação do crescimento em volume de negócios de visão de máquina entre os
continentes.
Os continentes Americano e Asiático em 2011 apresentaram um aumento
significativo nos negócios de visão computacional em relação à Alemanha e o
continente Europeu.
A inspeção de produtos geralmente se encontra em processos repetitivos e o
uso de máquinas neste âmbito é extremamente vantajoso. Assim, os sistemas de
visão aplicados à esses cenários são recomendados pela precisão, confiabilidade e
velocidade, trazendo vantagens no aumento de produtividade, melhorias no controle
de qualidade, diminuição drástica de desperdícios, inspeção de 100% dos produtos,
segurança, feedback do processo produtivo,além de fazer o registro das inspeções e
visualização de estatísticas de produção.
A Figura 6 apresenta uma linha de produção com um único tipo de produto
em um ambiente totalmente estruturado. Sendo extremamente rápido, o
procedimento pode ser feito em milésimos de segundos, atividade que está fora da
capacidade humana. Assim, a câmera é capaz de capturar, processar e propiciar
parâmetros para a execução de tarefas do manipulador.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-10-320.jpg)
![11
Fonte [7].
Figura 6 – Processo de Inspeção por visão computacional.
A integração de um sistema de visão computacional através de mecanismos
robóticos resulta em aprimoramento da inspeção de produtos em linhas de produção
além de reduzir de forma drástica o uso de componentes, como sensores de:
proximidade, posição e orientação [3]. Quando acoplado à um sistema de visão
artificial, o manipulador ganha sentido e percepção sensorial de forma ampla pela
riqueza de informações que uma imagem pode conter.
Enquanto sensores de proximidade tato torque e força desempenham um
importante papel na melhoria do desempenho de robôs, visão de máquina é
reconhecidamente, a mais completa capacidade de sensoriamento utilizada
[13].
Segundo [8] o aumento das vendas de robôs em 2011 foi de 38%, sendo
vendidas 166.028 unidades em todo o mundo, apresentando o crescimento mais
significativo em relação aos outros anos, principalmente na indústria automobilística
e metal. Os países com maior crescimento foram China, Estados Unidos e
Alemanha com taxas entre 39% e 51%. Foram fornecidos para a Alemanha 19.533
novos robôs industriais, o maior mercado de robôs na Europa. Mesmo com a crise
enfrentada em 2009 esse continua sendo o maior número já registrado para um ano,
cerca de 45% da oferta total para a Europa. Contudo esses países não superam os
maiores mercados, Japão e Coréia do Sul que cresceram abaixo da média no ano
de 2011.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-11-320.jpg)
![12
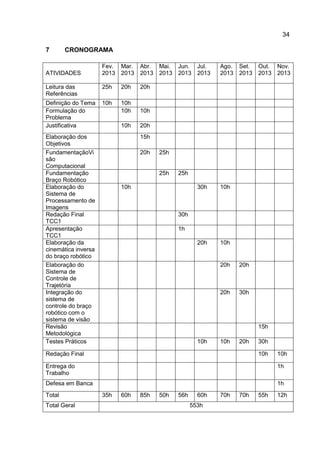
Tabela 1 – Estimativa do crescimento anual em vendas de robôs industriais.
PAÍSES 2010 2011 2012* 2015*
America 17.114 26.227 30.600 35.100
América do Norte (Canada, Mexico, USA) 16.356 24.341 28.000 31.000
América Cetral e Sul 758 1.886 2.600 4.100
Asia/ Australia 69.833 88.698 98.900 116.700
China 14.978 22.577 26.000 35.000
India 776 1.547 2.000 3.500
Japão 21.903 27.894 31.000 35.000
República da Coréa 23.508 25.536 26.800 25.000
Taiwan 3.290 3.688 4.400 5.500
Thailand 2.450 3.453 4.100 7.000
Outros Asia/Australia 2.928 4.003 4.600 5.700
Europa 20.483 43.826 44.100 47.200
República Tcheca 402 1.618 2.000 3.000
França 2.049 3.058 3.300 3.500
Alemanha 14.061 19.533 19.000 20.000
Itália 4.517 5.091 4.600 4.900
Espanha 1.897 3.091 2.500 3.000
Reino Unido 878 1.514 2.000 2.200
Outros Europa 6.937 9.921 11.100 10.600
Africa 259 323 350 500
Total** 120.585 166.028 180.950 207.500
Fonte: IFR, Associação nacional de robôs.
*Previsão
**Incluindo vendas que não são especificadas por países.
Fonte: [8], traduzida pelo autor.
O continente americano apresenta o maior crescimento já registrado com
53%, o que representa 26.200 unidades de robôs vendidos no ano de 2011. No
Brasil as vendas subiram para 1.440 unidades, 125% a mais que 2010.
Após a recuperação em 2010 os países da Ásia, a Austrália e a Nova
Zelândia se destacaram com um aumento de 132%, cerca de 88.700 unidades, já
em 2011 os níveis de crescimento para esses países foram mais moderados com
taxas de 27%.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-12-320.jpg)
![13
Fonte: [8], traduzida pelo autor.
Figura 7 – Estimativa mundial anual de embarques de robôs industriais
Em 2011, o Japão foi novamente o maior mercado de robôs no mundo. O
fornecimento destes continuou em recuperação e aumentou em 27% quase 28 mil
unidades. A Coréia do Sul teve um aumento nas vendas de robôs em 9%, 25.536
unidades.
O aumento das vendas para todos os setores envolvidos com a produção de
robôs aumentou em 37% no ano 2011, exceto para o setor automotivo, elétrica e
eletrônica. A Figura 8 mostra uma estimativa do fornecimento de produtos anual em
todo mundo para robôs industriais.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-13-320.jpg)
![14
Fonte: [8], traduzida pelo autor.
Figura 8 – Estimativa do fornecimento de produtos anual mundial para robôs industriais.
Os valores acima demonstrados não incluem o custo de software, periféricos
e engenharia de sistemas, a nível mundial, o valor para estes se aproximaria de 25,5
milhões de dólares para o ano de 2011.
Segundo a IFR (International Federation of Robotics - Federação
Internacional de Robótica), a China deve se tornar o maior consumidor mundial de
robôs em dois anos, devido à queda do preço dos robôs e o aumento dos salários. O
custo dos operadores está com quase a mesma proporção da aquisição de novos
robôs no sistema fabril da China. Na fábrica de iPhones e iPads da Apple
“Foxconn”, por exemplo, o custo unitário de um robô industrial atingiu cerca de US$
48 mil no ano de 2011, uma diferença pequena para os US$ 44 mil pagos a um
funcionário durante dois anos..
A companhia suíça ABB afirmou que, em sua filial no país, 120 pequenos
robôs substituíram 280 trabalhadores, com aumento de produção de 15%.
De acordo com a versão oficial, a empresa “liberou” os operários de uma
atividade repetitiva e cansativa.
Analistas econômicos apontam que no Brasil o custo de mão de obra está
muito mais alto que em outros países emergentes [17]. Com essa dificuldade de se](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-14-320.jpg)

![17
5 FUNDAMENTAÇÃO TEÓRICA
5.1 AQUISIÇÃO DE IMAGENS
O processo de conversão de uma cena real tridimensional para uma imagem
analógica denomina-se aquisição de imagens. Os sensores mais difundidos
atualmente para aquisição de imagens são o CCD (Charge CoupledDevice –
Dispositivo de Carga acoplado) e o CMOS (Complementary Metal Oxide
Semicondutor – Semicondutor de Óxido Metálico Complementar).
O sensor CCD consiste em uma matriz de células semicondutoras
fotossensíveis (matriz de sensores) que atuam como capacitores, armazenando
carga elétrica proporcional à energia luminosa incidente. O sinal elétrico produzido é
captado por circuitos eletrônicos que produzem um Sinal Composto de Vídeo (SCV)
analógico e monocromático [9]. Por outro lado o sensor CMOS faz a leitura digital
diretamente com um único sensor, estes são fabricados em processo semelhante ao
de microprocessadores. Os elementos fotosensíveis dos sensores CMOS estão
diretamente acoplados em resistores, permitindo uma contínua transformação da
quantidade luminosa recebida em um sinal elétrico proporcional [10]. A tecnologia do
CMOS tem evoluído rápido, por isso alguns equipamentos profissionais compensam
a menor sensibilidade do CMOS.
5.2 PROCESSAMENTO DE IMAGENS DIGITAIS
O processamento digital de imagens é responsável por fazer operações do
tipo restauração e realce em uma determinada cena, procedimentos estes que
geralmente são expressos por meio de algoritmos. Segundo [11], o processamento
de imagens é caracterizado por soluções específicas, assim, técnicas que funcionem
bem em uma área podem se mostrar totalmente inadequada em outra área. Tudo
que a disponibilidade de hardware e software faz é fornecer um ponto de partida
muito mais avançado que há alguns anos atrás.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-17-320.jpg)
![18
5.3 VISÃO COMPUTACIONAL
Visão computacional, também conhecida como visão de máquina é
responsável por extrair informações e características importantes de uma imagem
que tem como principal objetivo auxiliar na tomada de decisões inteligentes feitas
por uma máquina (robô). Esse tipo de processamento de imagens está enquadrado
no nível alto. Visão de alto nível se refere a processos que tendem simular o
raciocínio, utilizando-se de métodos de inteligência artificial. Por outro lado, visão de
baixo nível não necessita de inteligência, reage de forma automática ao processo
[12].
5.4 AMOSTRAGEM E QUANTIZAÇÃO
Para que uma imagem possa ser processada de forma digital ela precisa ter
sua função digitalizada tanto espacialmente quanto em amplitude. A
digitalização das coordenadas espaciais é denominada amostragem da
imagem e a digitalização da amplitude é chamada de quantização[11].
A amostragem consiste em tomar a informação contínua e analógica do sinal
a distâncias equidistantes ao longo dos eixos vertical e horizontal da imagem,
enquanto a quantização extrai os valores de intensidade luminosa identificados nos
pontos amostrados. O processo de amostragem e quantização de uma imagem está
intimamente ligado à resolução da imagem produzida. Quanto maior o número de
pontos amostrados na imagem, maior será a resolução espacial desta. Do mesmo
modo que, quanto maior o número de níveis de intensidade luminosa considerados
na imagem para representar a tonalidade de um ponto amostrado, maior será a
resolução de tonalidades da imagem. Assim a organização de uma imagem pode ser
representada facilmente por uma estrutura matricial, onde o número de pixels das
linhas e colunas da matriz é determinado pela amostragem do sinal, e o valor
numérico dos elementos é extraído da quantização [10].](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-18-320.jpg)
![19
Fonte: [10]
Figura 9 - Amostragem e quantização dos dados analógicos de uma linha da imagem.
5.5 VIZINHOS DE UM PIXEL
O método utilizado para definir uma vizinhança entre pixels de coordenadas
é usar uma sub-imagem quadrada ou retangular centrada em [12]. Um
pixel qualquer denominado possui vizinhos horizontais e verticais com
coordenadas , , e para a chamada 4-
vizinhança. As coordenadas , , e
representam os quatro vizinhos diagonais de . A união da 4-vizinhança
com os vizinhos diagonais formam o conjunto 8-vizinhança que engloba todos os
pixels vizinhos de “p”, como mostra a Figura 10, onde e seus vizinhos
representam “1”.
Fonte: [10]
Figura 10 – Representação de vizinhança.
5.6 CONECTIVIDADE
A conectividade entre pixels estabelece quando estes estão conectados,
quando possuem a mesma propriedade para pertencer à mesma região ou ao](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-19-320.jpg)
![20
mesmo objeto. Para estabelecer se dois pixels estão conectados é preciso detectar
se eles são adjacentes e se seus níveis de cinza satisfazem critérios de similaridade
[11] [12]. A conectividade pode ser estabelecida por meio de três critérios:
A. 4-conectividade: Um par de pixels vizinhos é dito 4 conectado se eles
possuem um lado em comum.
B. 8-conectividade: Um par de pixels vizinhos é dito 8-conectado se eles
possuem um lado ou um canto em comum.
C. m-conectividade: Abreviação de conectividade mista. Consiste em uma
modificação da 8-conectividade, visando eliminar possíveis duplicidades de conexão
entre dois pixels.
Fonte: [11]
Figura 11 – (a) Distribuição de pixels - (b) 8-conectividade – (c) m-conectividade – As linhas
representam o caminho entre aquele pixel e os seus vizinhos.
5.7 CALIBRAÇÃO
A calibração de um sistema de visão computacional determina elementos que
correlacionam medidas dos objetos do mundo real que contém informações
tridimensionais com medidas atuais na imagem bidimensional. Fazendo a tradução
dos pixels de uma imagem para uma unidade de medição padrão conhecida [10]
[13].
A calibração pode ser classificada como intrínseca e extrínseca. Segundo [13]
Pode-se dizer que a calibração intrínseca é feita a partir das características
geométricas internas da câmera tais como, distância focal, coordenadas do centro
da imagem, tamanho do pixel e coeficientes de distorção (radial, tangencial, etc).
Enquanto a calibração extrínseca é caracterizada pelas informações geométricas
externas como, posição e orientação tridimensional do sistema da câmera em
relação a um sistema de coordenadas fixo, tomado como referência. Quando a
calibração é retratada para sistemas de visão aplicado na robótica o objetivo é](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-20-320.jpg)
![21
determinar a relação entre o sistema de coordenada da câmera e o sistema de
coordenadas do manipulador robótico.
5.8 HISTOGRAMA
As informações estatísticas da distribuição de cores de uma imagem podem
ser demonstradas através de manipulação de histogramas, uma das técnicas mais
conhecidas para tais análises [10].
Através de um histograma é possível visualizar o percentual de pixels em uma
imagem que apresentam um determinado nível de cinza, valores que normalmente
são representados por gráficos que fornecem para cada nível de cinza o percentual
de pixels que correspondem à imagem, desta forma é possível obter informações
quanto à qualidade da imagem, como contraste e brilho médio [15].
5.9 MODELOS DE CORES
5.9.1 O Modelo RGB
Todos os objetos que emitem luz visível são percebidos pelo olho humano
através da soma das cores espectrais emitidas, esse processo é a combinação
variável em proporção de componentes monocromáticos nas faixas espectrais
associadas às sensações de cor verde, vermelha e azul que são responsáveis pela
formação de todas as demais cores [16].
As cores verde, vermelha e azul formam o modelo RGB que é baseado em
um sistema de coordenadas cartesianas. Segundo [15], o modelo RGB pode ser
representado por um cubo como mostra a Figura 12, onde três vértices são as cores
primárias e os outros três as cores secundárias, o vértice junto à origem é preto e o
mais afastado da origem representa a cor branca.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-21-320.jpg)
![22
Fonte: [15]
Figura 12– Representação do Modelo RGB.
Os níveis de cinza se estendem através de uma linha diagonal do cubo que
sai da origem até o vértice mais distante. A faixa de valores de níveis de cinza
geralmente é representada de 0 a 1 ou de 0 a 255, para cada cor do modelo RGB.
5.9.2 O Modelo YIQ
O modelo YIQ se baseia na separação dos sinais de cor RGB em uma
componente de luminosidade (Y) e duas componentes de cromaticidade (I Q). A
transformação do modelo RGB para o sistema YIQ é dada pela multiplicação das
matrizes ilustradas pela Figura 13.
Fonte: [15]
Figura 13 – Matriz de conversão do modelo RGB para YIQ.
5.9.3 O Modelo HSI
No modelo HSI de cores a componente de intensidade I é retirada da
informação de cor da imagem e as componentes de matiz e saturação são
relacionados com a percepção que os humanos têm das cores, sendo a matiz
responsável por descrever a cor pura e a saturação apresenta um grau de diluição
de uma cor pura por luz branca. Segundo [11], o modelo HSI é uma ferramenta
muito indicado para o desenvolvimento de algoritmos de processamento de imagens](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-22-320.jpg)
![23
baseado em algumas propriedades do sistema visual humano, como por exemplo,
fazer a detecção automática do amadurecimento de frutas e vegetais por imagem e
inspeção de qualidade de produtos coloridos.
5.10 LIMIARIZAÇÃO
A técnica de detecção de limiares é responsável por separar o objeto de
interesse do restante da imagem baseado em uma análise da similaridade de níveis
de cinza ou níveis de intensidade luminosa. Operações de limiarização simples
correspondem à bipartição do histograma, fazendo a conversão de pixel cujo tom de
cinza é maior ou igual a um determinado range de valores limiar brancos e os
demais em pretos, tendo assim o nível de intensidade luminosa ao qual se deseja
realizar o ponto de corte, também conhecido como binarização [15] [10].
Em um modelo RGB existe um range de valores de 0 a 255 tons de cinza,
para cada componente. Tomando como exemplo a componente azul, se um limiar
“T” for definido entre 100 e 150 todas as tonalidades abaixo de 100 e acima de 150
se tornam informações de fundo da imagem, enquanto os valores entre 100 e 150
tornam se a informação correspondente ao objeto de cor azul, podendo definir o
valor “0” para o fundo da imagem e “1” para o objeto azul, preto e branco
respectivamente. A Figura 14 ilustra a técnica de detecção de limiares simples, como
descrito acima.
Fonte: [10]
Figura 14 – Técnica de detecção de limiares simples. (a) Imagem limiar. (b) Histograma e limiar. (c)
Imagem binarizada.
Em imageamento colorido todos os níveis de intensidade podem estar
presentes. Para fazer a detecção dos múltiplos limiares é necessário definir uma
faixa de valores de intensidade luminosa para cada entidade da imagem. Uma que
contém dois valores de limiar (azul e vermelho), define-se que < azul
correspondem ao fundo da imagem, valores em que azul > > vermelho
correspondem a um determinado objeto e > vermelho outro objeto da cena.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-23-320.jpg)
![24
Mais valores de limiar podem ser definidos em uma mesma cena, sendo as técnicas
de segmentação baseadas em regiões mais adequadas [11] [10].
5.11 ILUMINAÇÃO
A iluminação é fundamental para que a cena capturada pela câmera tenha
qualidade o suficiente para o processamento, uma vez que o objeto não emite luz
própria e que a câmera captura luz refletida sobre a cena observada.
Existem muitas soluções de visão que requerem inclusive a aplicação de luz
incidente em faixas não visíveis do espectro luminoso, como por exemplo,
as imagens de tomografia médica, algumas imagens astronômicas e
imagens infra-vermelho de curvas de calor [10].
Existem diversas técnicas de iluminação, direcional, multidirecional, luz de
fundo, difusa, estruturada, entre outras. O emprego de cada uma destas irá
depender do grau de realce que precisa ser obtido no objeto. Segundo [10], um
projeto de iluminação de um sistema de visão é composto do tamanho exato do
campo de visão, fonte luminosa e a geometria, que diz respeito à posição da fonte
em relação ao objeto e sensor, eficácia e características necessárias para realçar as
partes desejáveis do objeto de forma homogênea e constantes ao longo do tempo.
Fonte: [12]
Figura 15 – Exemplos de Técnica de Iluminação.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-24-320.jpg)
![25
5.12 COMPONENTES DE UM ROBÔ INDUSTRIAL
Segundo [21], um robô industrial é formado pela integração dos seguintes
itens:
A. Manipulador Mecânico: O manipulador mecânico é constituído de elos
conectados entre si por meio de juntas. As juntas são responsáveis por permitir
flexibilidade ao robô, com movimentos lineares ou rotacionais.
O número de juntas define quantos graus de liberdade o robô possui.
Fonte: [21]
Figura 16 - Representação de elos e juntas de um robô.
B. Atuadores: São componentes responsáveis por converter energia do
tipo hidráulica, pneumática e eletromagnética em potência mecânica.
C. Sensores: São responsáveis por enviar informações como posição e
velocidade dos elos em função do tempo e informações de torque, força e visão
computacional como meio de interação do robô e o ambiente.
D. Efetuador: Elemento do tipo garra ou ferramenta conectado ao robô e
ao meio que o cerca.
5.13 CLASSIFICAÇÃO GEOMÉTRICA DE ROBÔS INDUSTRIAIS
A classificação geométrica dos robôs descreve o movimento que ele executa,
definidas quanto ao tipo de junta (rotação, translação) que são comumente
denominados sistemas geométricos coordenados [19].
A. Robô Antropomórfico: Tipo de configuração que permite maior
flexibilidade ao robô é composto de no mínimo três juntas de rotação.
B. Robô de Coordenadas Cartesianas: Constituído de três juntas
prismáticas com movimentos de translação. O volume de trabalho gerado é
retangular.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-25-320.jpg)
![26
C. Robô de Coordenadas Cilíndricas: Formado por duas juntas
prismáticas e uma de rotação, movimentos de duas translações e uma rotação. O
volume de trabalho gerado é cilíndrico.
D. Robô de Coordenadas Esféricas: Uma junta prismática e duas de
rotação constituem o robô, movimentos de umatranslação e duas rotações. O
volume de trabalho gerado éaproximadamente uma esfera.
E. Robô SCARA: Muito usado na montagem de placa de circuitos
eletrônicos, formado por duas juntas de rotação dispostas em paralelo para se ter
movimento num plano e uma junta prismática perpendicular a este plano, com
movimentos de uma translação e duas rotações. O volume de trabalho gerado é
aproximadamente cilíndrico.
F. Robô Paralelo: Configuração tipo plataforma e mecanismos em forma
de cadeia cinemática fechada. O volume de trabalho é semi-esférico [21].
Fonte: [21]
Figura 17 – Volume de trabalho de robôs industriais. (a) Robô antropomórfico. (b) Robô cartesiano.
(c) Robô de coordenadas cilíndricas. (d)Robô de coordenadas esféricas. (e) Robô SCARA.
5.14 CINEMÁTICA DE UM BRAÇO ROBÓTICO
O movimento de um corpo ou conjunto de corpos levando em consideração a
ausência de sua massa e forças atuantes sobre estes, pode ser definido como
cinemática [19].
O modelo geométrico de um robô expressa a posição e orientação de um
elemento terminal em relação a um sistema de coordenadas fixo, em relação à base](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-26-320.jpg)
![27
[20], em outras palavras, uma das extremidades (base) é fixa, enquanto a outra é
livre para se movimentar no espaço.
Um manipulador é formado por um conjunto de elos conectados por
articulações, sendo que cada elo possui um grau de liberdade, translação ou
rotação. Em 1955 Jacques Denavit e Richard Hartenberg propuseram uma forma
sistemática para descrever a geometria de um conjunto de elos com “N” graus de
liberdade.
Fonte: [20]
Figura 16 - Notação de Denavit-Hartenberg.
Na Figura 16 é possível notar que um eixo de uma junta estabelece a
conexão de dois elos. Estes eixos de juntas devem ter duas normais conectadas
neles, uma para cada um dos elos. A posição relativa destes dois elos conectados
(elo j-1 e elo j) é dada por “dj”, que é a distância medida ao longo do eixo da junta
entre suas normais. O ângulo de junta “θj” entre as normais é medido em um plano
normal ao eixo da junta.
Um elo “j” só pode estar conectado a dois elos no máximo. Do ponto de vista
cinemático os elos mantêm uma configuração fixa entre suas juntas que podem ser
definidos por dois parâmetros “aj” e “αj”, chamados respectivamente, comprimento e
ângulo de torção do elo “j”. Desta forma (aj, αj) determinam a estrutura do elo e os
parâmetros da junta, enquanto (dj, θj) definem a posição relativa de elos vizinhos
[21].](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-27-320.jpg)
![28
(5.1)
5.14.1 Cinemática Direta
A posição de um manipulador no espaço onde se encontra é descrita pela
cinemática direta. A posição e velocidade podem ser obtidas a partir da matriz de
transformação homogênea que por sua vez é estabelecida a partir dos parâmetros
de DH (Denavit – Hartenberg).
Segundo [19], um ponto qualquer “P” expresso ao sistema de
coordenadas, pode ser expresso no sistema de coordenadas como
com os seguintes itens:
A. Rotação no eixo de um ângulo alinhando o eixo com o
eixo .
B. Translação de uma distância de ai ao longo do eixo trazendo os
eixos e na coincidência.
C. Translação ao longo do eixo a uma distância de trazendo as
duas origens com o eixo na coincidência.
D. Rotação no eixo de um ângulo de para trazer os dois sistemas
de coordenadas na coincidência.
As operações citadas acima podem ser descritas por uma matriz de
transformação homogênea de rotação – translação sendo o produto das quatro
matrizes o resultado da matriz homogênea composta, também conhecida como
matriz de transformação de DH, conforme ilustrado na equação 5.1.
[ ] [ ] [ ] [ ]
[ ]
Onde:
e = Constantes;
= Variável de junta para uma junta rotativa.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-28-320.jpg)
![29
(5.2)
As juntas prismáticas possuem uma característica diferente, portanto sua
matriz de transformação é representada conforme equação 5.2.
[ ]
Onde:
e α = Constantes
= Junta prismática variável;
5.14.2 Cinemática Inversa
As juntas de um robô precisam ter um movimento de referência (angular) para
um dado movimento de referência do elemento terminal, em outras palavras,
encontrar os ângulos de juntas partindo das referências do objeto a ser capturado
pelo manipulador.
Os métodos analíticos e numéricos iterativos trazem soluções para obtenção
da inversão do modelo geométrico. Quando a definição do modelo de DH traz a
maioria de seus resultados nulos, ou seja, quando se tem um robô simples, o
método analítico é mais indicado, pois apresenta todas as soluções possíveis. O
método numérico iterativo conduz para uma solução entre todas as existentes.
Dentre os métodos numéricos iterativos tem-se o método recursivo, que faz uso do
cálculo do modelo geométrico direto da matriz jacobiana inversa [19].](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-29-320.jpg)
![32
Fonte: [18]
Figura 16 – Webcam h4tech.
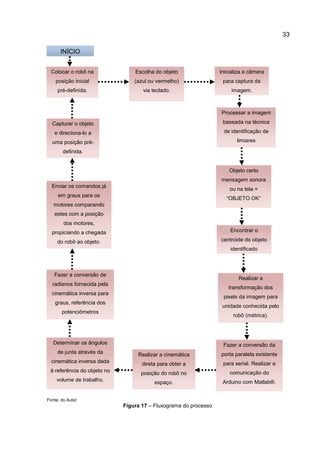
Na Figura 17 é representado em forma de fluxograma o funcionamento
proposto nesse projeto de pesquisa.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-32-320.jpg)
![35
8 REFERÊNCIAS
[1]STIVANELLO, M. E. Inspeção Industrial Através de Visão Computacional. 2004.
Dissertação (Bacharelado em Ciência da Computação) – Universidade Regional de
Blumenau Centro de Ciências Exatas e Naturais, Blumenau.
[2]Imatic Sistemas industriais de Visão. Disponível em
<www.imatic.com.br/svisao.htm> acesso em: 24 mar. 2013.
[3]VIECILI, E, B; ALCANTRA, M, F; ROMÃO, A; HOUNSELL, M, S; PILLON, M, A;
HEINEN, M, R. Desenvolvimento de um Robô Móvel com Visão para Propósitos
Educacionais. 2012. Dissertação (Universidade do Estado de Santa Catarina) –
Departamento de Ciência da Computação, Joinville.
[4]Siemens. Disponível em
<www.siemens.com/innovation/en/publikationen/publications_pof/pof_fall_2006/susta
inable_city_development/facts_and_forecasts.htm> acesso em 30 mar. 2013.
[5]Verband Deutscher Maschinen und Anlagenbeu VDMA. Disponível em
<www.vdma.org> acesso em: 24 mar. 2013.
[6]European Machine Vision Association EMVA. Disponível em <www.emva.org>
acesso em: 24 mar. 2013.
[7]Packagers Choose Machine Vision Quality Inspection to Red Waste and Boost
ROI
[8]International Federation Robotics. Disponível em <www.ifr.org> acesso em: 07
abr. 2013.
[9]FOREST, R, L. Sistema de Visão Robótica para Reconhecimento de Contornos
de Componentes na Aplicação de Processos Industriais. 2006. Dissertação
(Universidade Federal do Rio Grande do Sul) – Programa de Pós Graduação em
Engenharia Mecânica, Porto Alegre.
[10]STEMMER, M, R; ORTH, A; ROLOFF, M, L; DESCHAMPS, F; PAVIM, A, X.
Apostila de Sistema de Visão. 2005. Sistemas Industriais Inteligentes, Florianópolis.
[11]GONZALEZ, R, C; WOODS, R, E. Processamento de Imagens Digitais. São
Paulo: Edgard BlucherLtda, 2000.
[12]GRASSI, M, V. Desenvolvimento e Aplicação de Sistema de Visão para Robô
Industrial de Manipulação. 2005. Dissertação (Universidade Federal do Rio Grande
do Sul) – Programa de Pós Graduação em Engenharia Mecânica, Porto Alegre.
[13] RODRIGUES, D, L. Procedimento Automático para calibração de Sistemas de
Visão Robótica para Operações Pick-and-Place. 1997. Dissertação (Divisão de Pós -
graduação do Instituto Tecnológico de Aeronáutica) – Engenharia Mecânica
Aeronáutica, São José dos Campos.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-35-320.jpg)
![36
[14]Campos, M, F; NETO, V, F. Visão Computacional Calibração de Câmeras. 2007.
(Universidade Federal de Minas Gerais) – Departamento de Ciência da Computação,
Minas Gerais.
[15]FILHO, O, M; NETO, H, V. Processamento Digital de Imagens. Rio de Janeiro:
Brasport, 1999.
[16]QUEIROZ, J, E; GOMES, H, M. Introdução ao processamento Digital de
Imagens. 2001. Artigo (Universidade Federal de Campina Grande) – Departamento
de Sistemas da Computação, Campina Grande.
[17]Amalgama.blog.br. Disponível em <www.amalgama.blog.br/02/2013/custo-da-
mao-de-obra-crescimento-do-brasil/ > acesso em: 31 mai. 2013.
[18]A4TECH. Disponível em <www.a4tech.com> acesso em: 27 abr. 2013.
[19]ROSÁRIO, J, M. Princípios de Mecatrônica. São Paulo: Pearson, 2006.
[20]CORKE, P. Robotics, Vision and Control Fundamental Algorithms in
MATLAB®. Brisbane: Springer, 2011.
[21] ROMANO, V, F. Robótica Industrial: Aplicação na Indústria da Manufatura e
de Processos. Rio de Janeiro: Edgard Blucher, 2002.](https://image.slidesharecdn.com/tccfinal-130830090103-phpapp02/85/TCC-I-VISAO-COMPUTACIONAL-APLICADA-EM-UM-BRACO-ROBOTICO-ANTROPOMORFICO-DIDATICO-36-320.jpg)















































