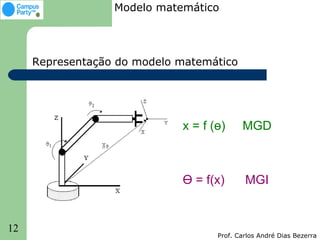
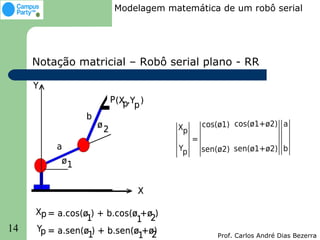
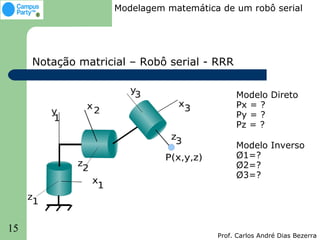
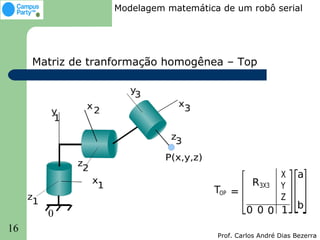
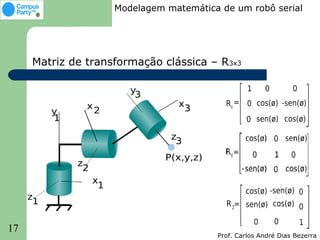
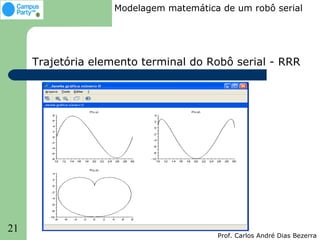
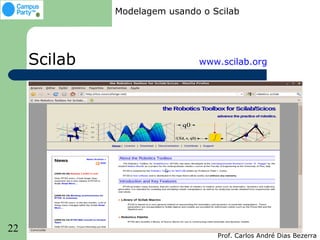
Este documento apresenta uma ferramenta de modelagem geométrica de robôs usando o software livre Scilab. Ele discute conceitos de robótica, modelo matemático e modelagem de robôs seriais, demonstrando como modelar um robô RRR no Scilab para obter sua trajetória.