Baixado 10 vezes

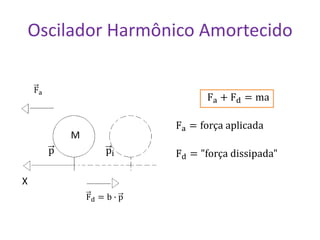
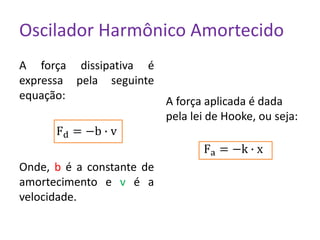
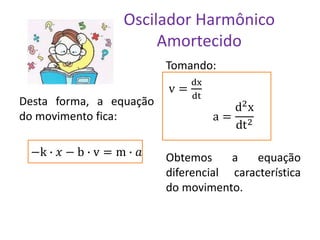
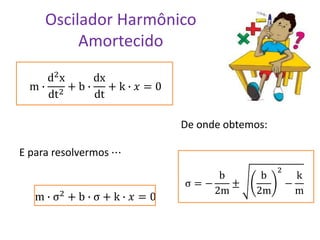
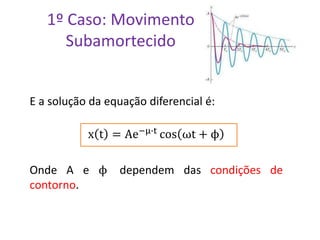
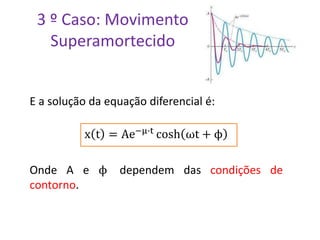

O documento descreve os três tipos de movimento de um oscilador harmônico amortecido: 1) subamortecido, onde as soluções são números complexos e o movimento é oscilatório decrescente; 2) amortecido crítico, onde a solução é real e exponencialmente decrescente; 3) superamortecido, onde as soluções também são reais e o movimento é hiperbólico decrescente. Para cada caso, são apresentadas as equações características e as soluções da equação diferencial do movimento.





























































