Transferir como PDF, PPTX






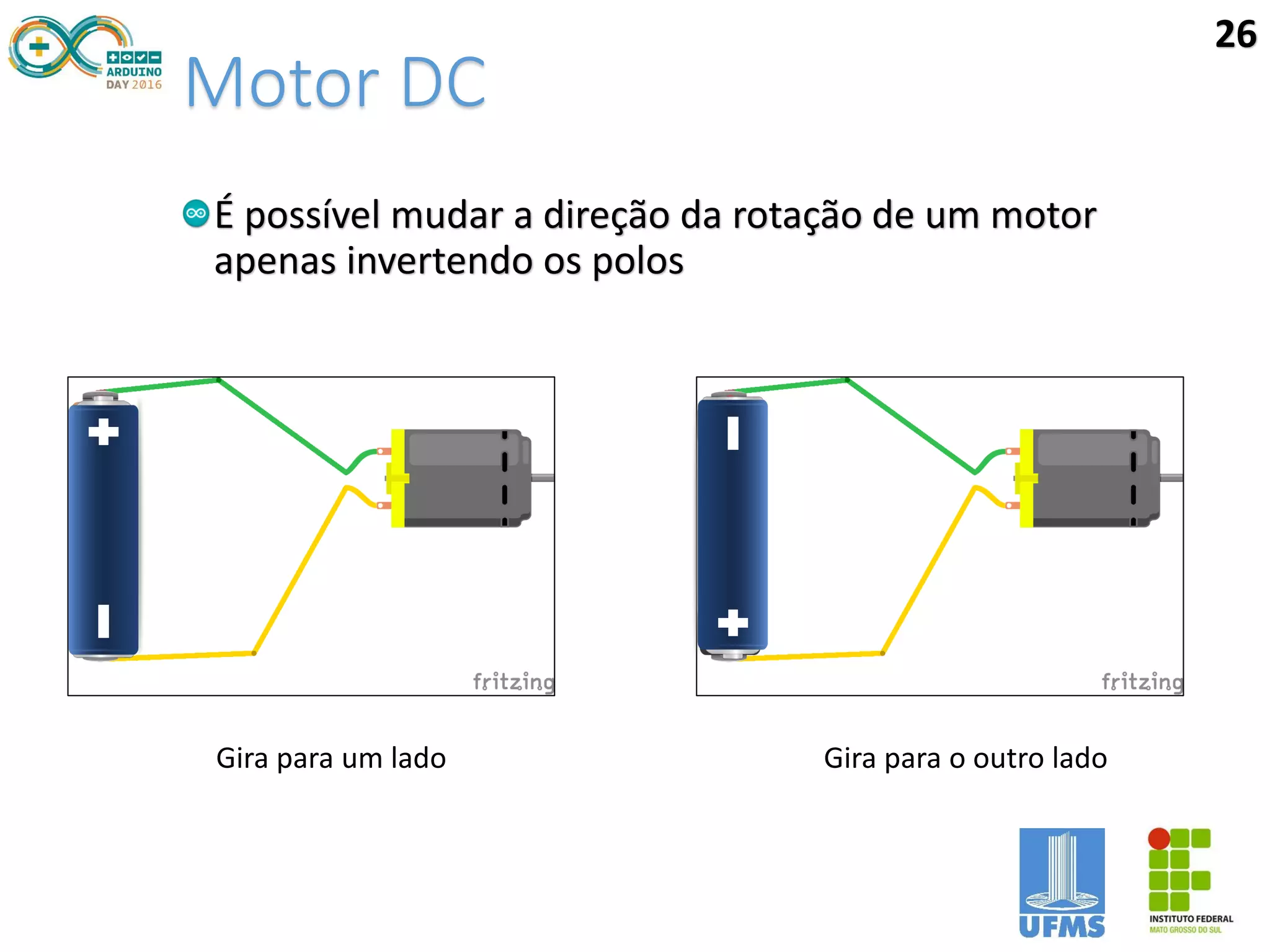
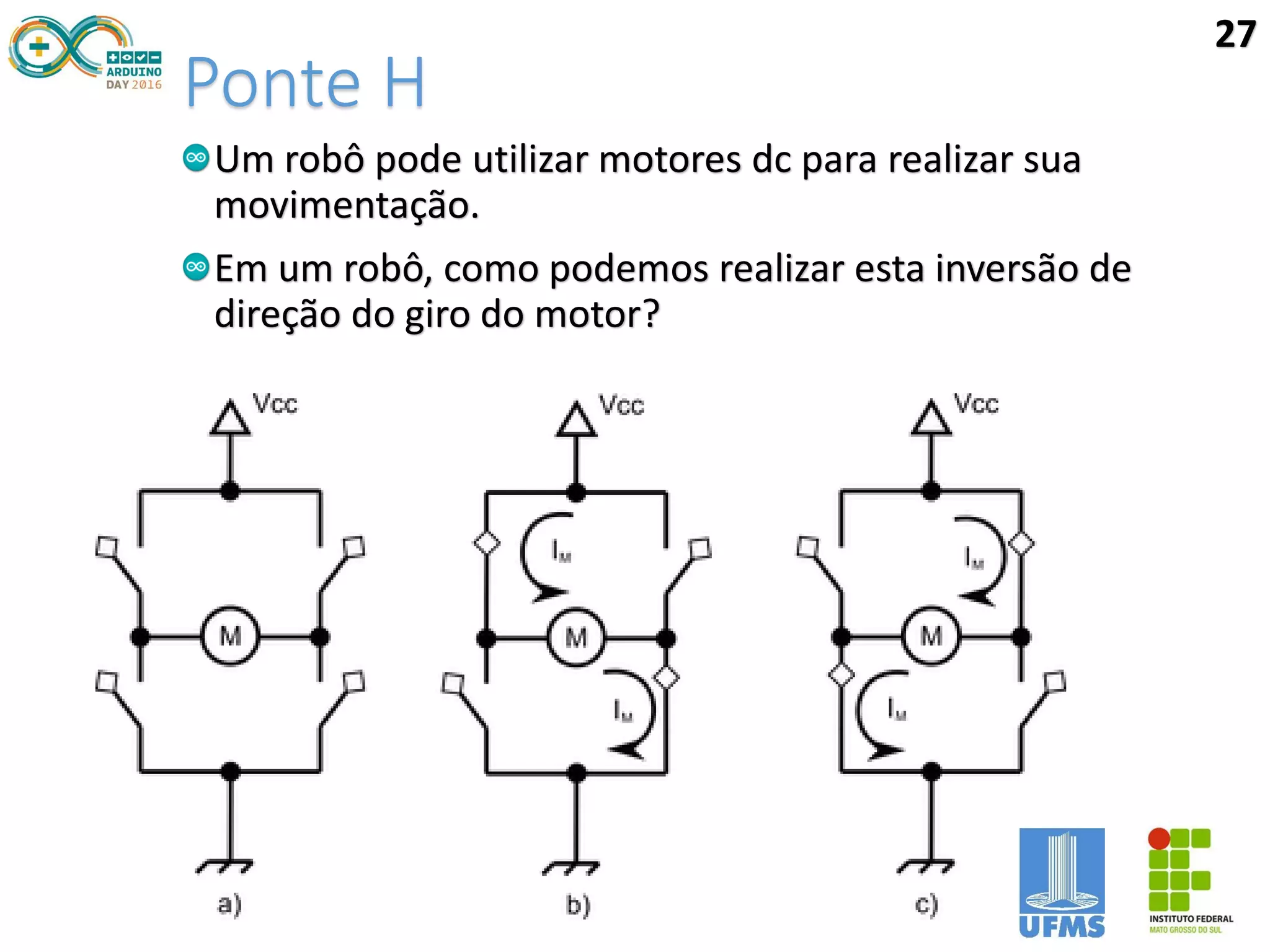

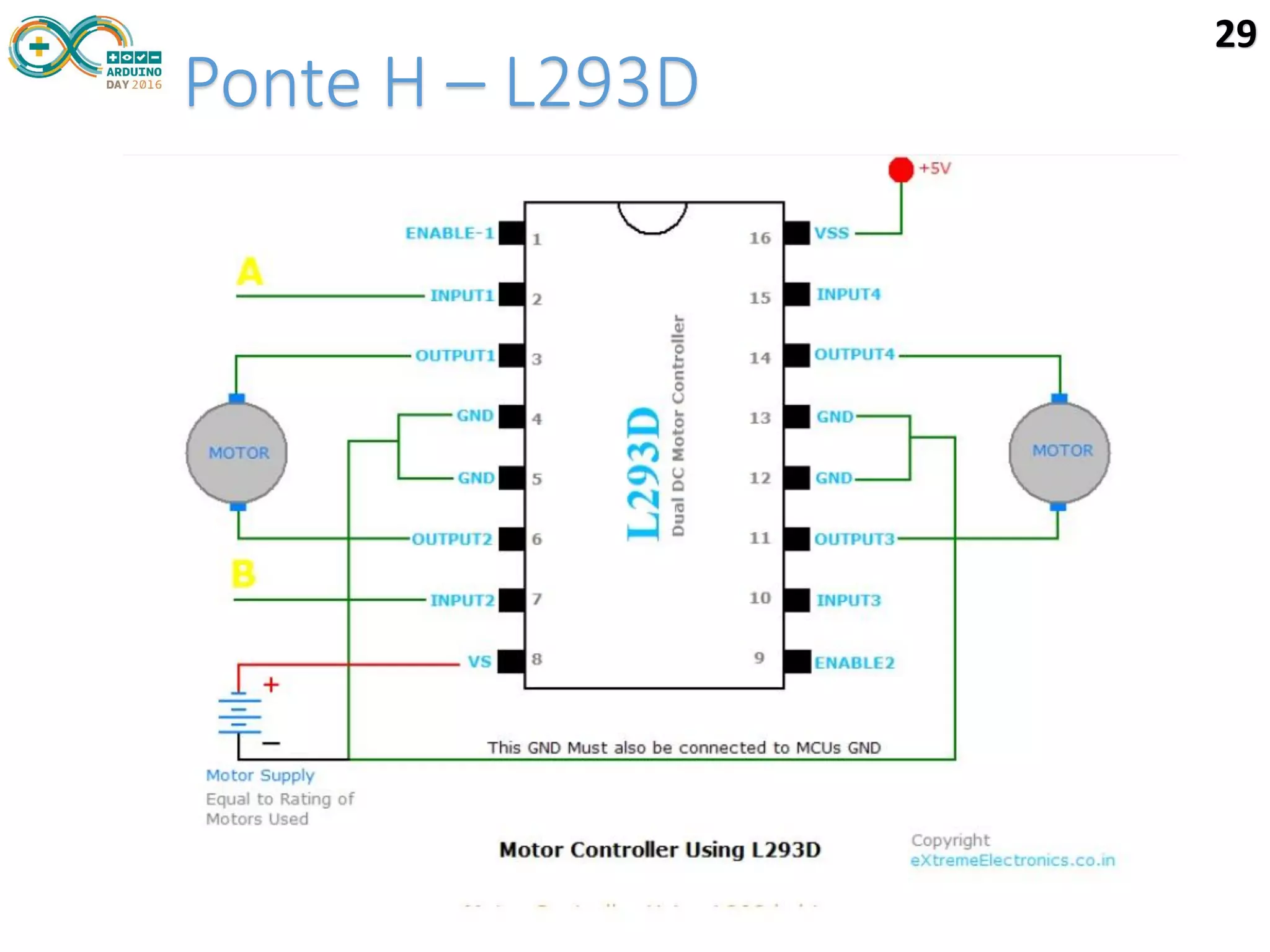
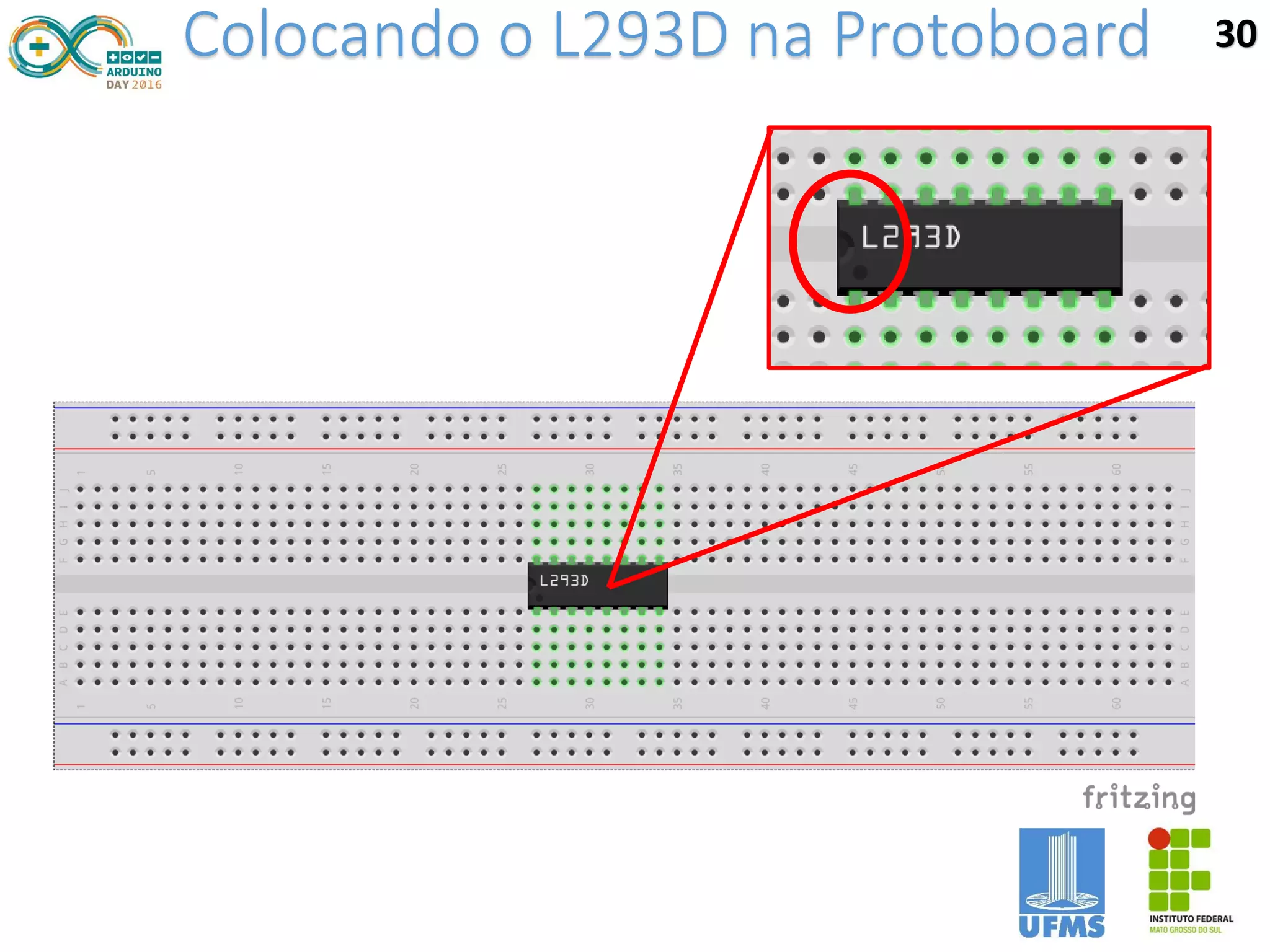
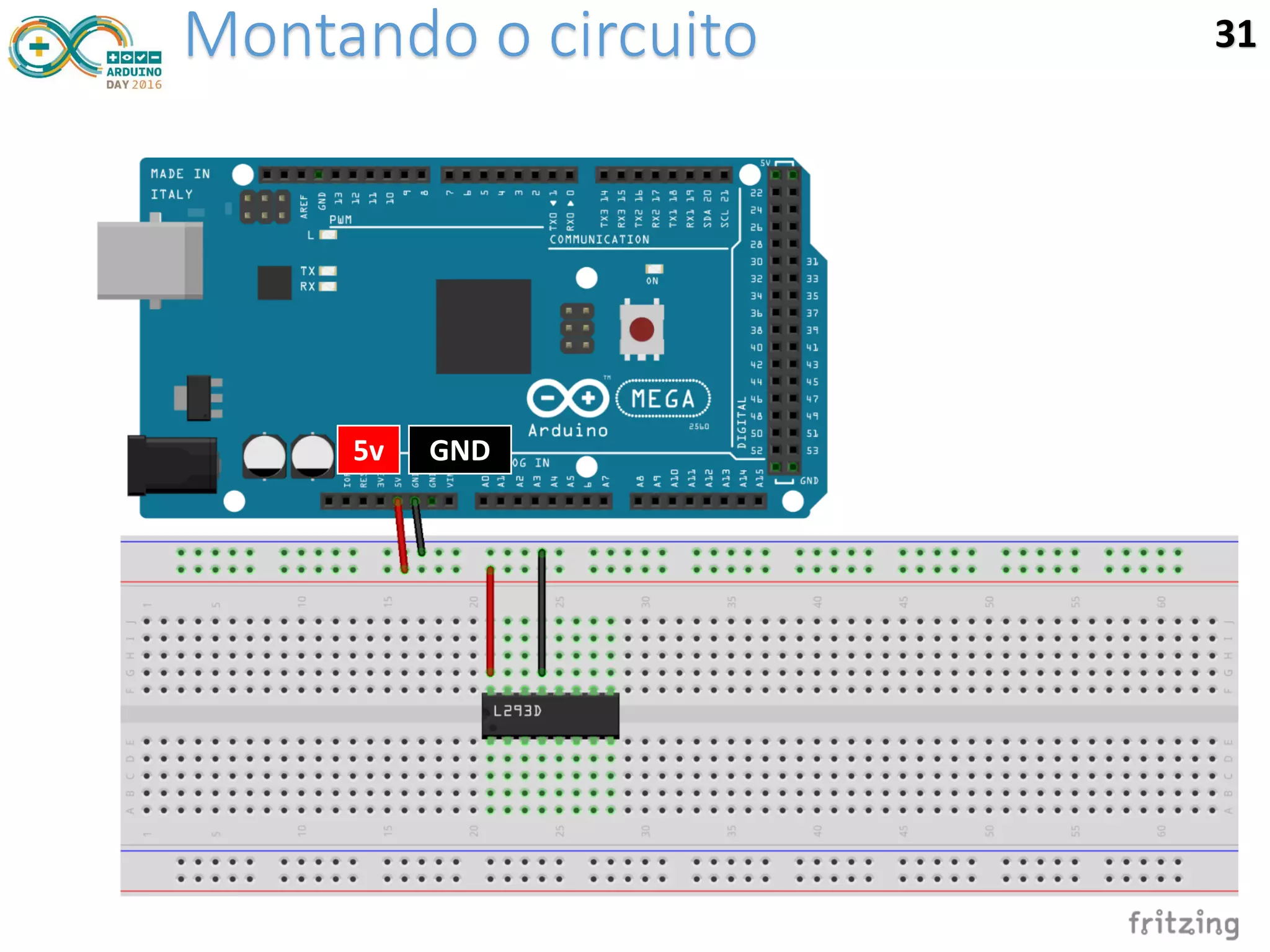
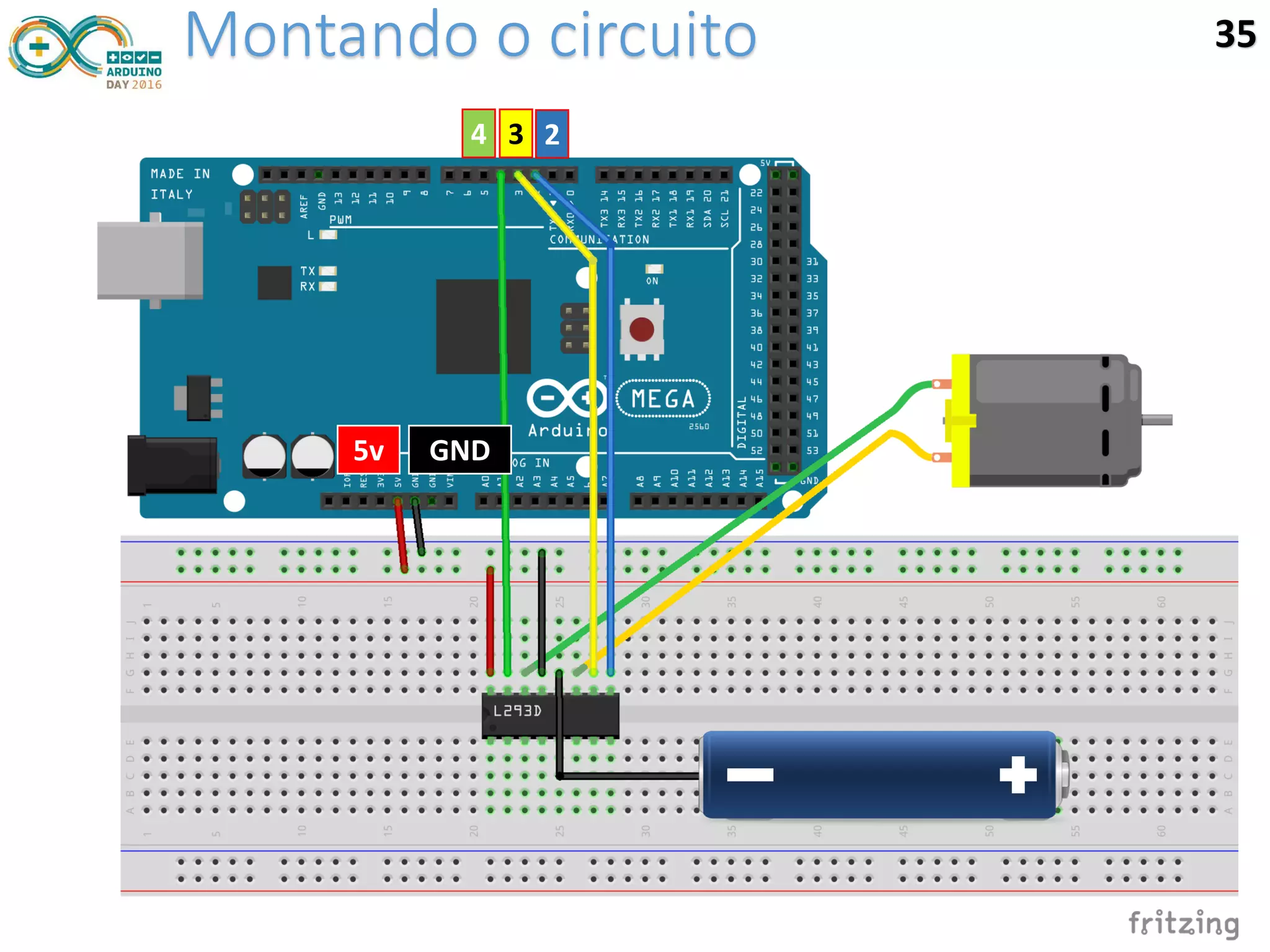
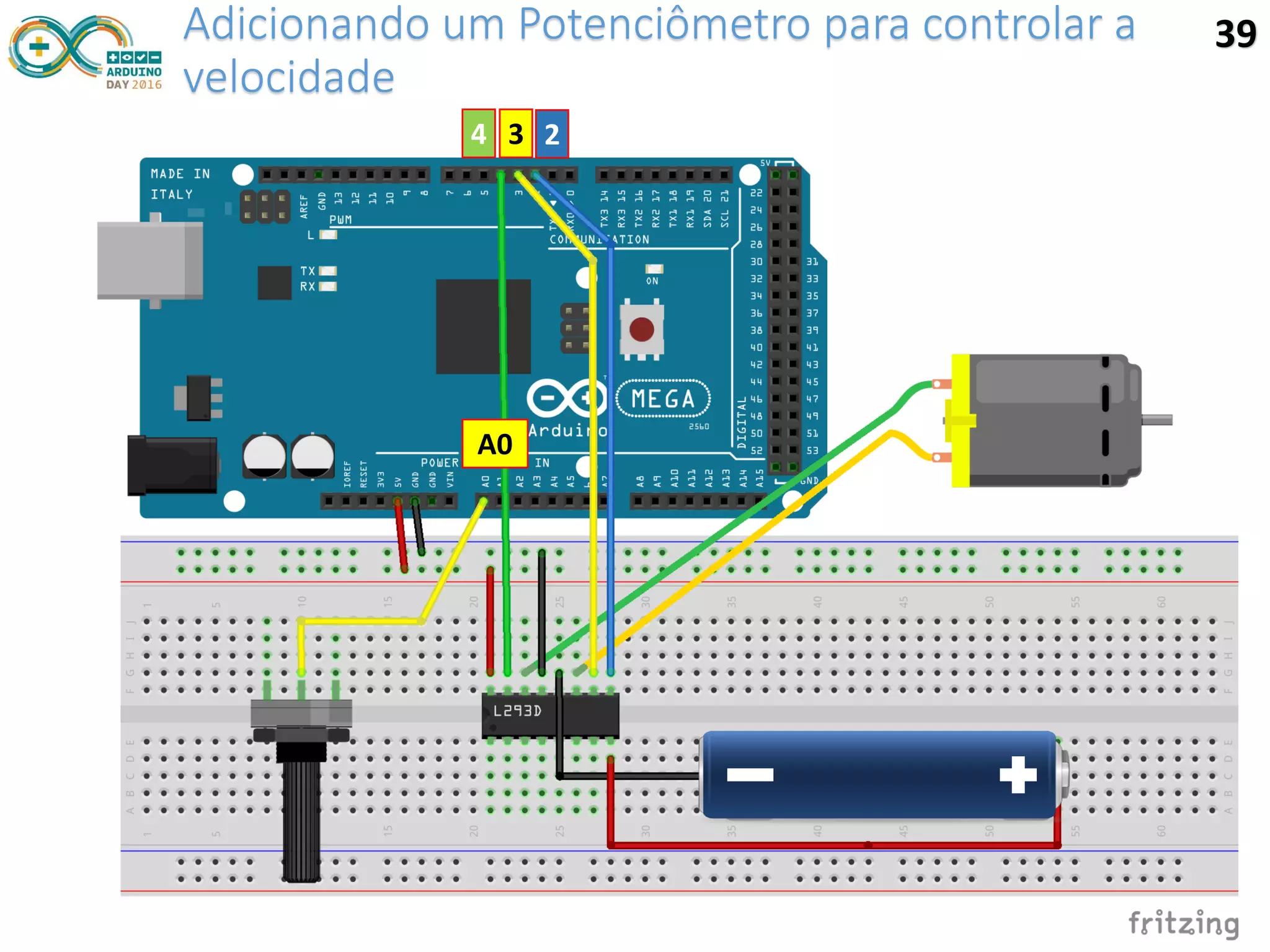
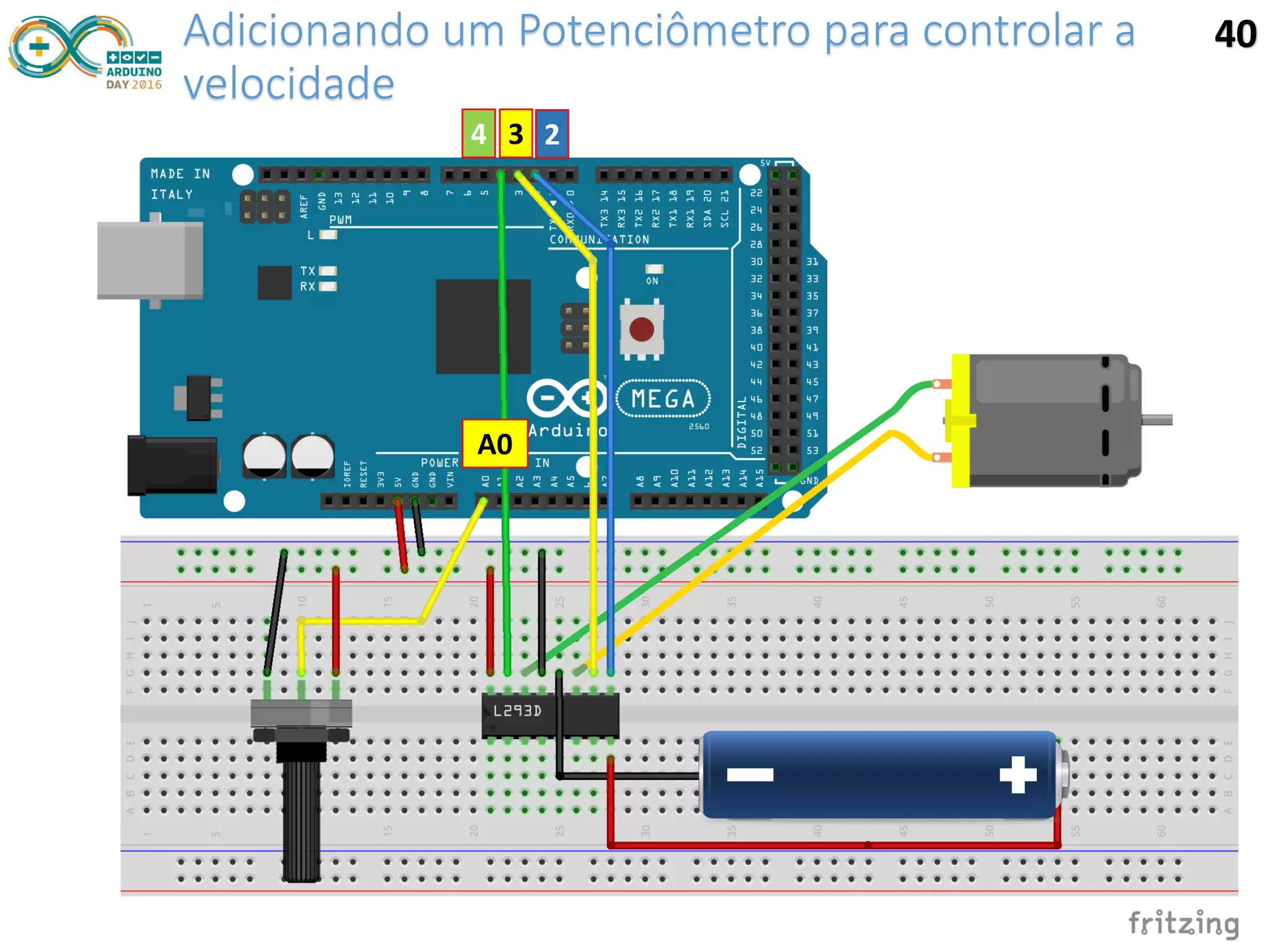
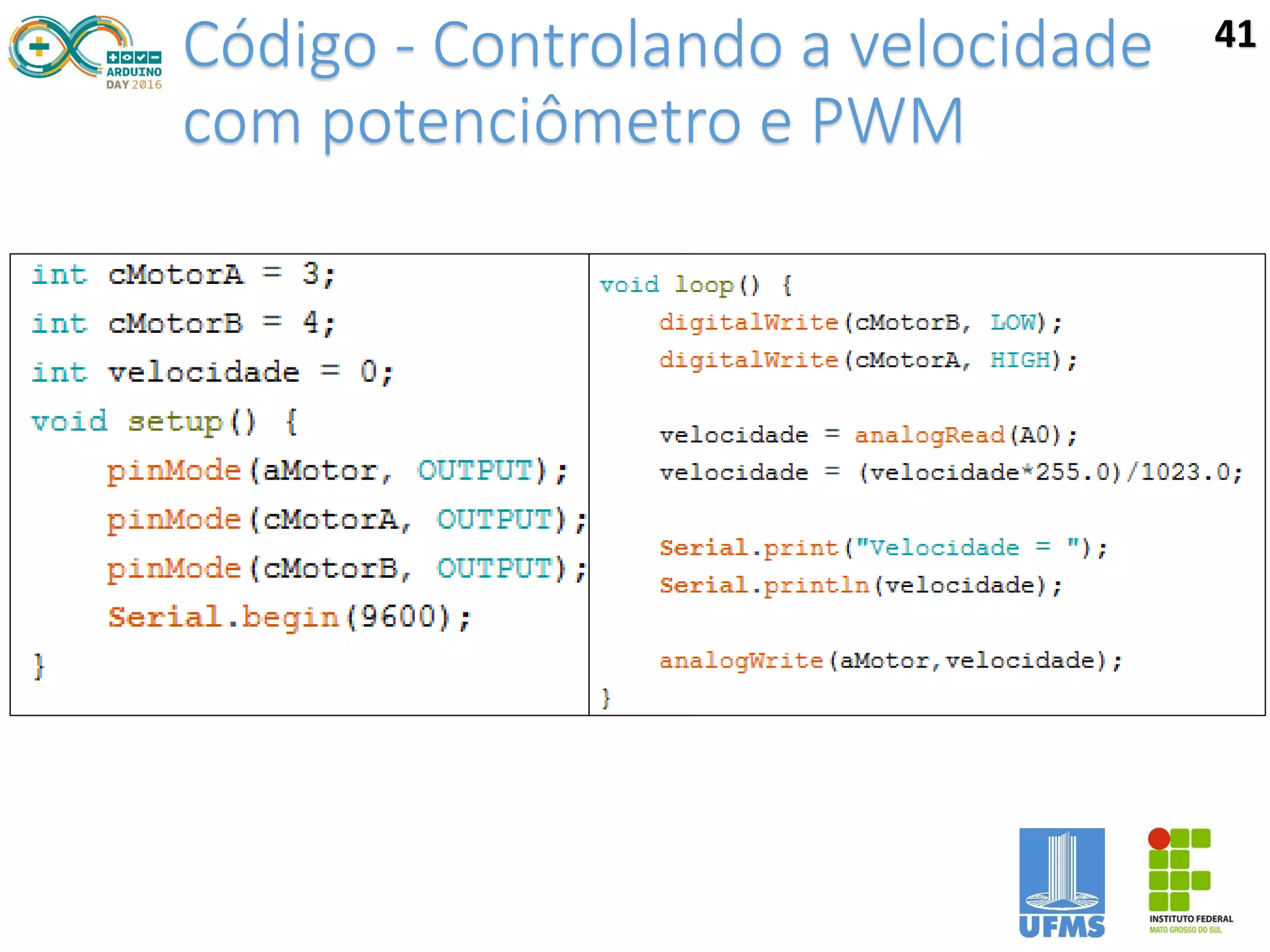
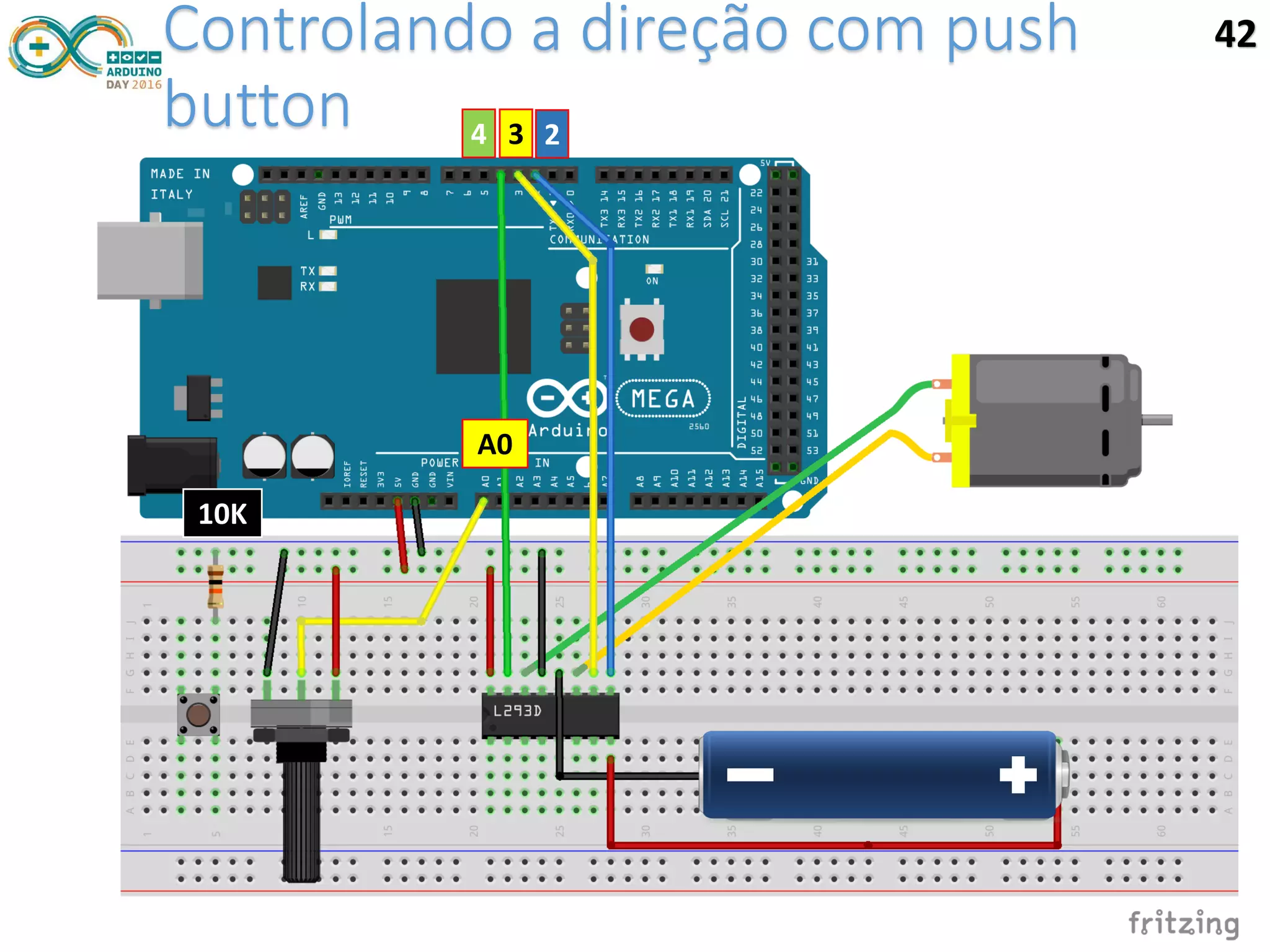
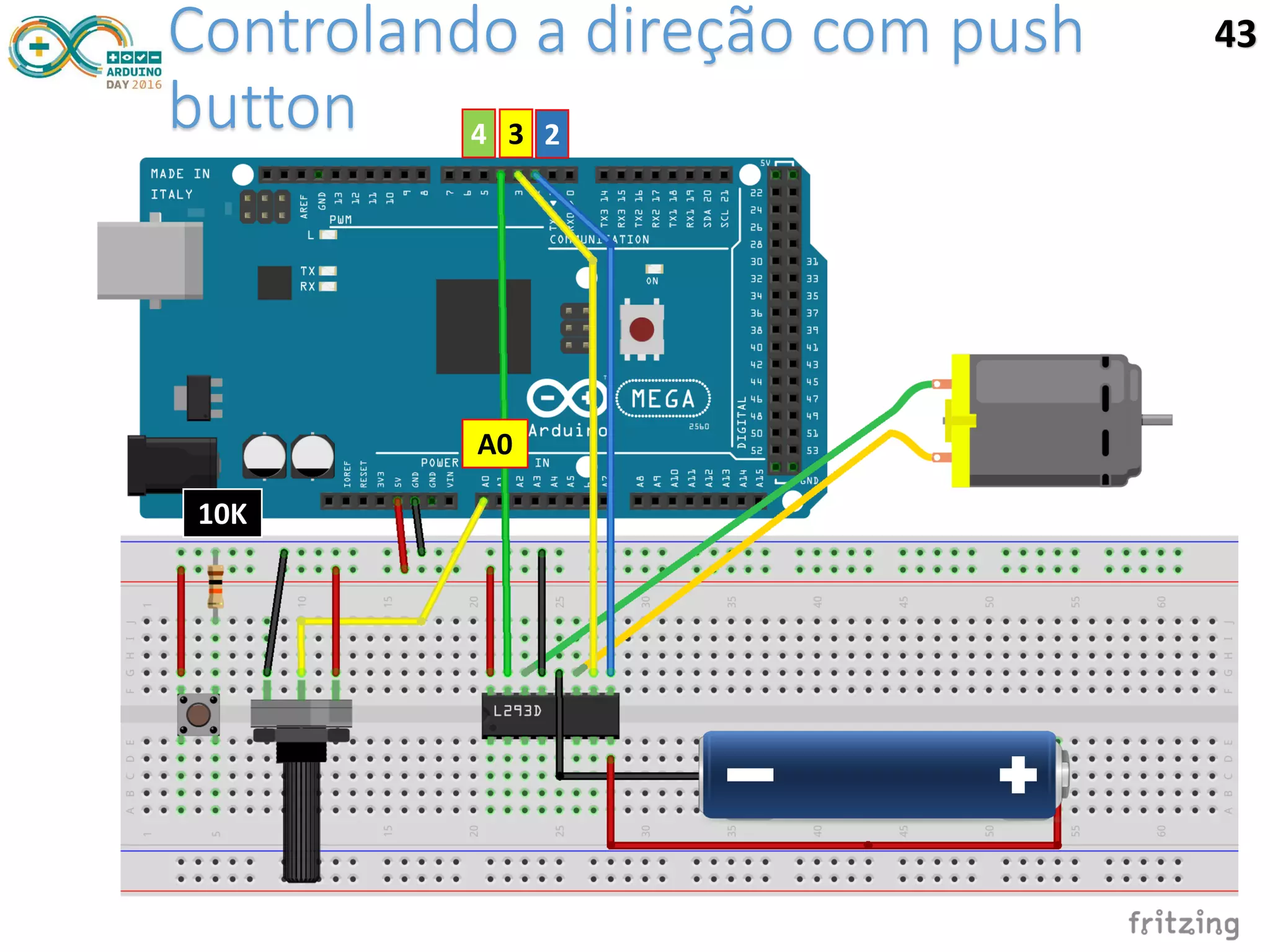

Este minicurso apresenta o conceito de ponte H e controle de motores DC com Arduino. O programa inclui acender LEDs, controlar a direção e velocidade de motores DC usando uma ponte H e componentes como potenciômetros e botões.