Baixado 43 vezes









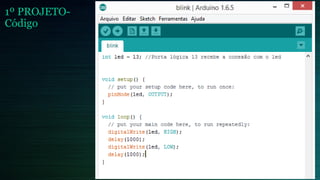



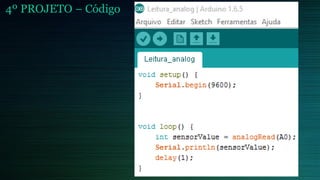

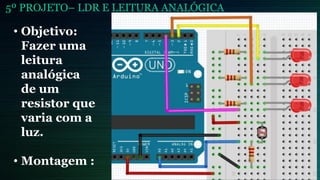
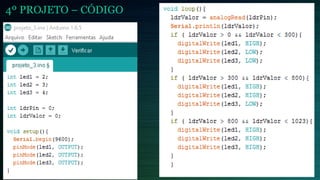




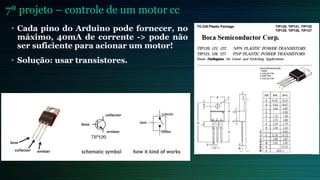

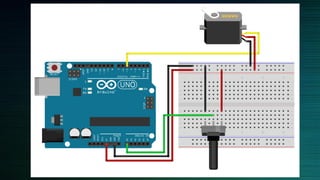
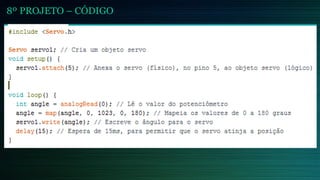
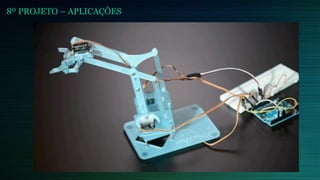
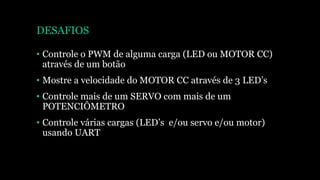


- O documento apresenta 8 projetos básicos utilizando a plataforma Arduino, incluindo fazer um LED piscar, ler entradas digitais e analógicas, comunicação serial, controle de intensidade de LED por PWM, controle de motor CC e servo motores.