O documento descreve o Arduino Hack Day, um evento colaborativo que reúne entusiastas e especialistas para a troca de conhecimentos sobre Arduino e suas aplicações. Aborda técnicas de programação, montagem de circuitos eletrônicos e controle de dispositivos por meio de microcontroladores, bem como exemplos práticos, como o controle de tomadas pela internet. Além disso, fornece informações técnicas sobre componentes do Arduino, como placas, shields e procedimentos para programar e utilizar os dispositivos.

















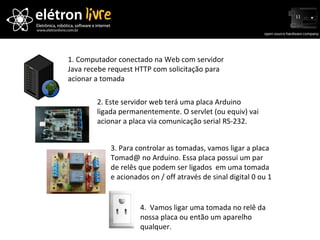
![Hacking Class Código Servlet response.setContentType("text/html;charset=UTF-8"); PrintWriter out = response.getWriter(); try { byte[] dados = new byte[1]; dados[0] = Byte.parseByte(request.getParameter("rele")); try { Arduino.enviar(dados); ...](https://image.slidesharecdn.com/arduinohackday-101214080644-phpapp02/85/Arduino-Hack-Day-por-Vinicius-Senger-51-320.jpg)