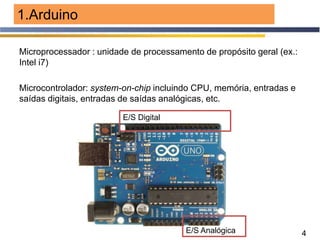
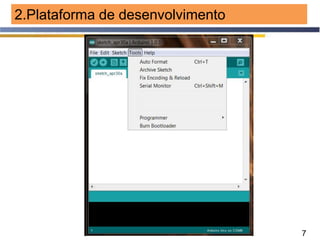
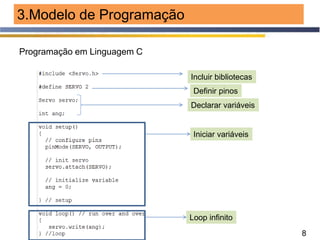
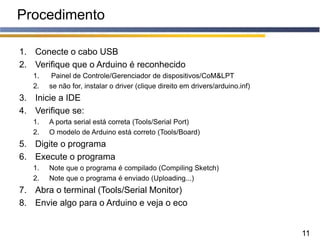
Este documento apresenta uma introdução ao Arduino, incluindo: (1) Uma explicação do que é um microcontrolador e como o Arduino se compara a um microprocessador, (2) As especificações técnicas do Arduino Uno, e (3) Demonstrações práticas de como usar o Arduino para controlar LEDs, entradas digitais e servos.