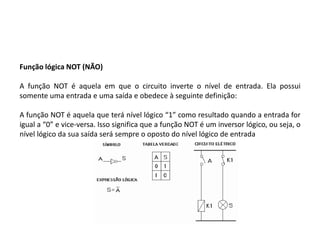
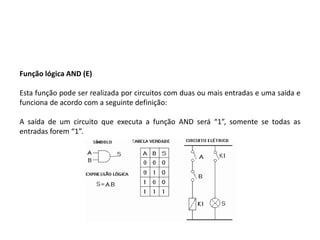
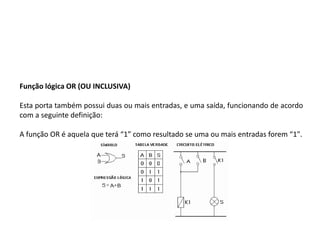
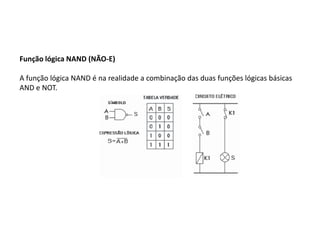
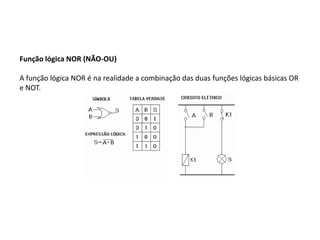
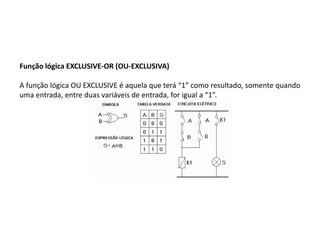
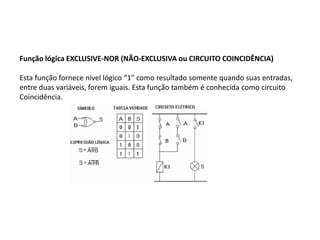
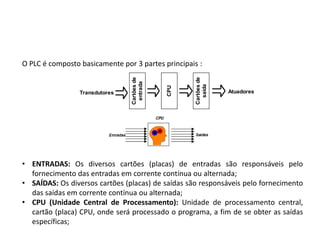
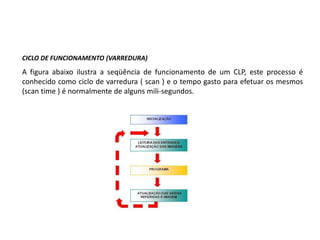
O documento descreve as principais funções lógicas utilizadas em circuitos digitais e controladores lógicos programáveis (CLPs), incluindo funções NOT, AND, OR, NAND, NOR, XOR e XNOR. Também fornece detalhes sobre as partes principais de um CLP e seu ciclo de varredura.