Baixar para ler offline

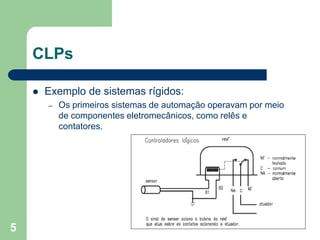
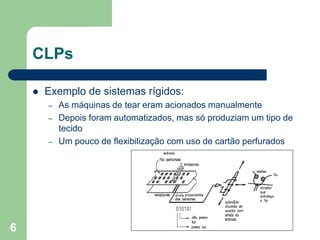
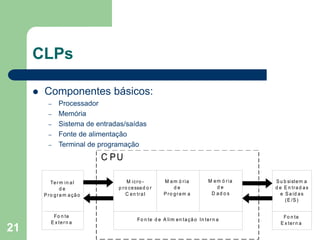
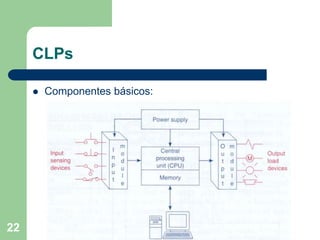
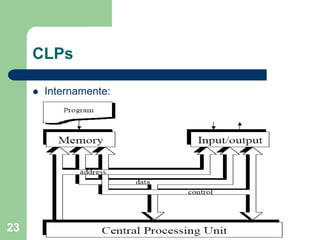

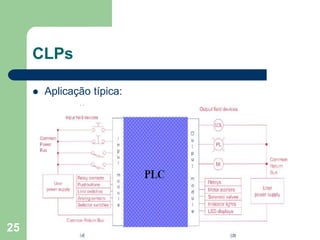

1) Os controladores lógicos programáveis (CLPs) são equipamentos eletrônicos de automação flexível que permitem desenvolver e alterar facilmente a lógica de controle de sistemas. 2) Os CLPs surgiram para permitir maior flexibilidade nos sistemas de automação em resposta à necessidade de mudanças frequentes nos processos industriais. 3) Os CLPs funcionam lendo entradas digitais e analógicas, executando programas lógicos para controlar saídas digitais e analógicas de acordo com a


























