Baixado 124 vezes
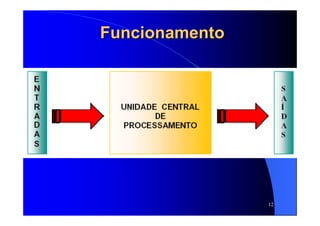


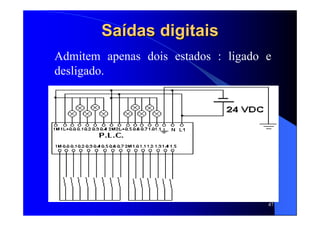


O documento discute controladores lógicos programáveis (CLPs), incluindo sua evolução, características, hardware e processamento. CLPs automatizam processos industriais permitindo controle rápido com poucos erros. Eles oferecem vantagens sobre sistemas de controle discretos, como menor espaço e consumo de energia.























































































