Baixado 68 vezes

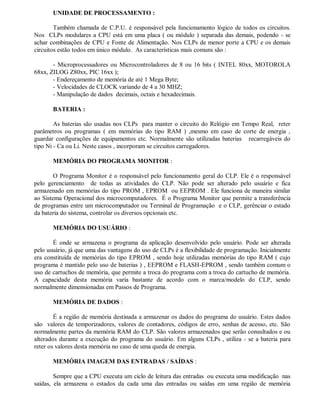
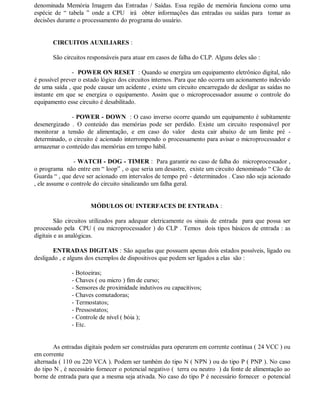


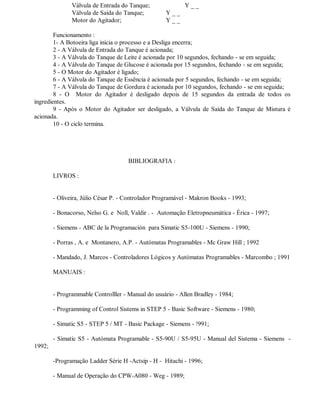
![PASSOS PARA A AUTOMAÇÃO DE UM EQUIPAMENTO COM CLPs
Início
Definição do pontos e tipos de entrada e saída
Elaboração do programa do usuário
Teste / Simulação / Depuração do programa
Instalação física do equipamento
Transferência do programa para o CLP
Rotinas de teste de funcionamento
Liberação do equipamento para uso
Fim
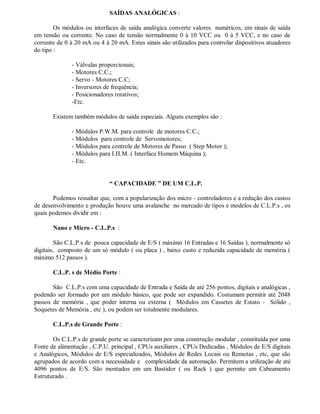
Y0
LD X0
ANI X1
LDI X3
AND X4
ORB
AND X2
OUT Y0
X0 X1 X2 Y0
X3 X4
DIAGRAMA DE CONTATOS
Y0 = { [ ( X0 . X1 ) + ( X3 . X4 ) ] . X2 }
EXPRESSÃO LÓGICA](https://image.slidesharecdn.com/basicosobreclp-130624235858-phpapp01/85/Basico-sobre-clp-12-320.jpg)



O documento descreve a história e evolução dos controladores lógicos programáveis (CLPs). O CLP foi desenvolvido na década de 1960 para simplificar a programação de painéis de controle na indústria automobilística. Desde então, os CLPs evoluíram através de 5 gerações, tornando-se mais versáteis, poderosos e fáceis de programação. Atualmente, os CLPs são amplamente usados em diversos setores industriais e permitem a integração de sistemas automatizados.



































































