Baixado 13 vezes
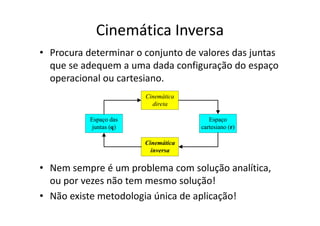

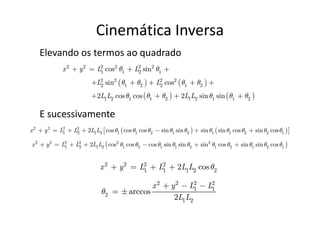
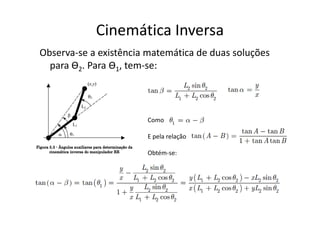
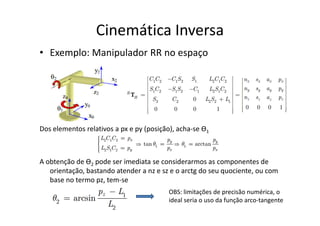
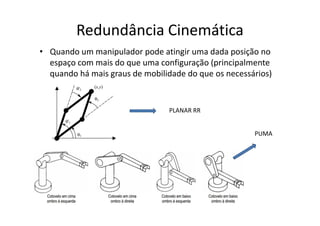
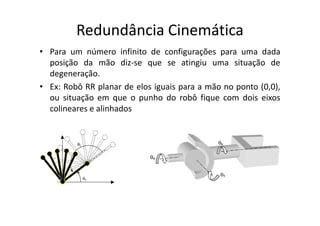
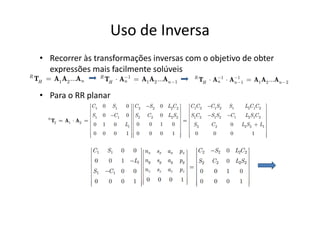
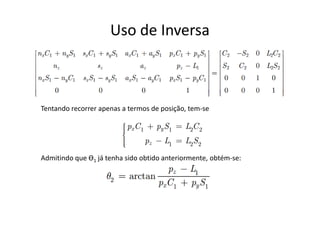
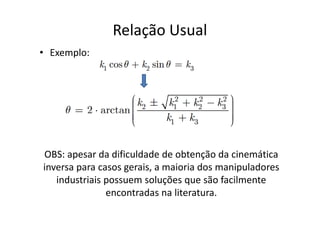
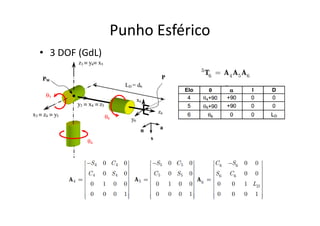
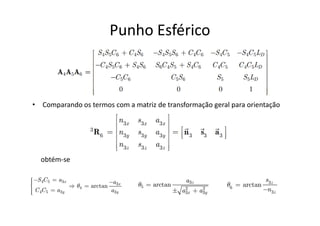

A aula aborda a cinemática inversa de manipuladores seriais, que determina os valores das juntas para uma configuração no espaço operacional. A cinemática inversa nem sempre tem solução analítica e pode haver múltiplas soluções ou degeneração. Exemplos incluem cinemática inversa de manipuladores planares RR e situações de redundância cinemática.




























































