Baixado 24 vezes






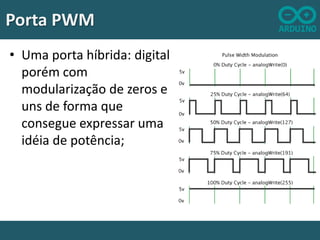



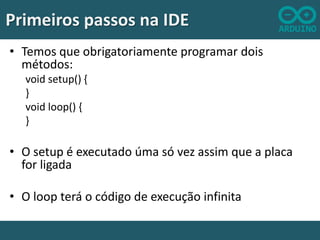
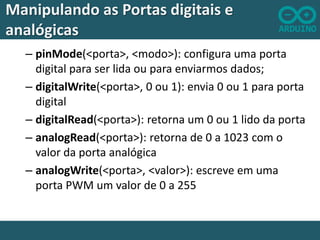
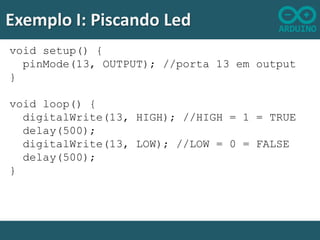
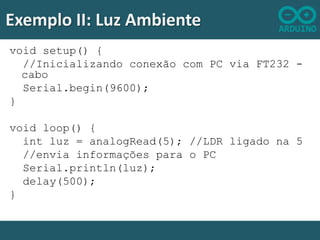





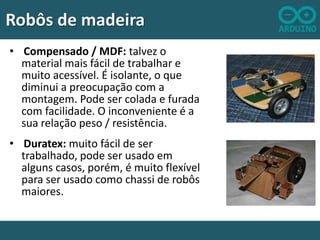

O documento apresenta o Arduino, uma plataforma de hardware e software open-source para desenvolvimento de projetos eletrônicos e robótica. Descreve as características do Arduino, como programá-lo usando a IDE, exemplos de aplicações e robótica com Arduino utilizando diferentes materiais de construção.




























































