Baixado 455 vezes

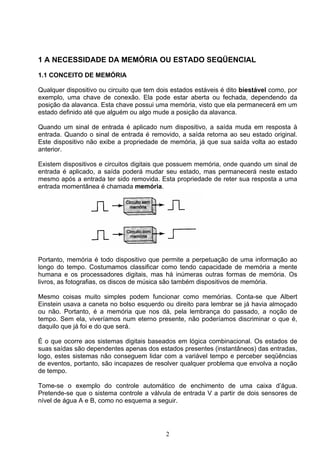
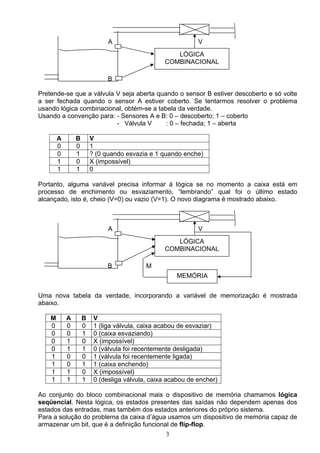











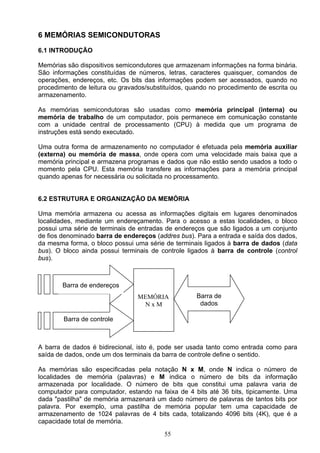









1. O documento discute a necessidade de memória em sistemas digitais para permitir que eles lidem com variáveis relacionadas ao tempo, como sequências de eventos. 2. É introduzido o conceito de memória e dispositivos biestáveis que podem reter informações. 3. É usado o exemplo de um sistema de controle de nível de água para ilustrar como a memória permite que sistemas digitais resolvam problemas que envolvam a noção de tempo.




















































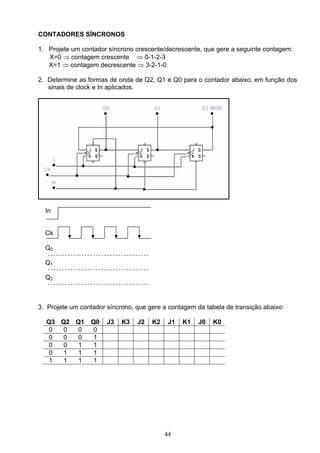
![Eletronica digital fet potencia[1]](https://cdn.slidesharecdn.com/ss_thumbnails/eletronicadigitalfetpotencia1-170711152632-thumbnail.jpg?width=640&height=640&fit=bounds)




























