Baixar para ler offline



















![Arquitetura de Computadores II Página 33 de 95
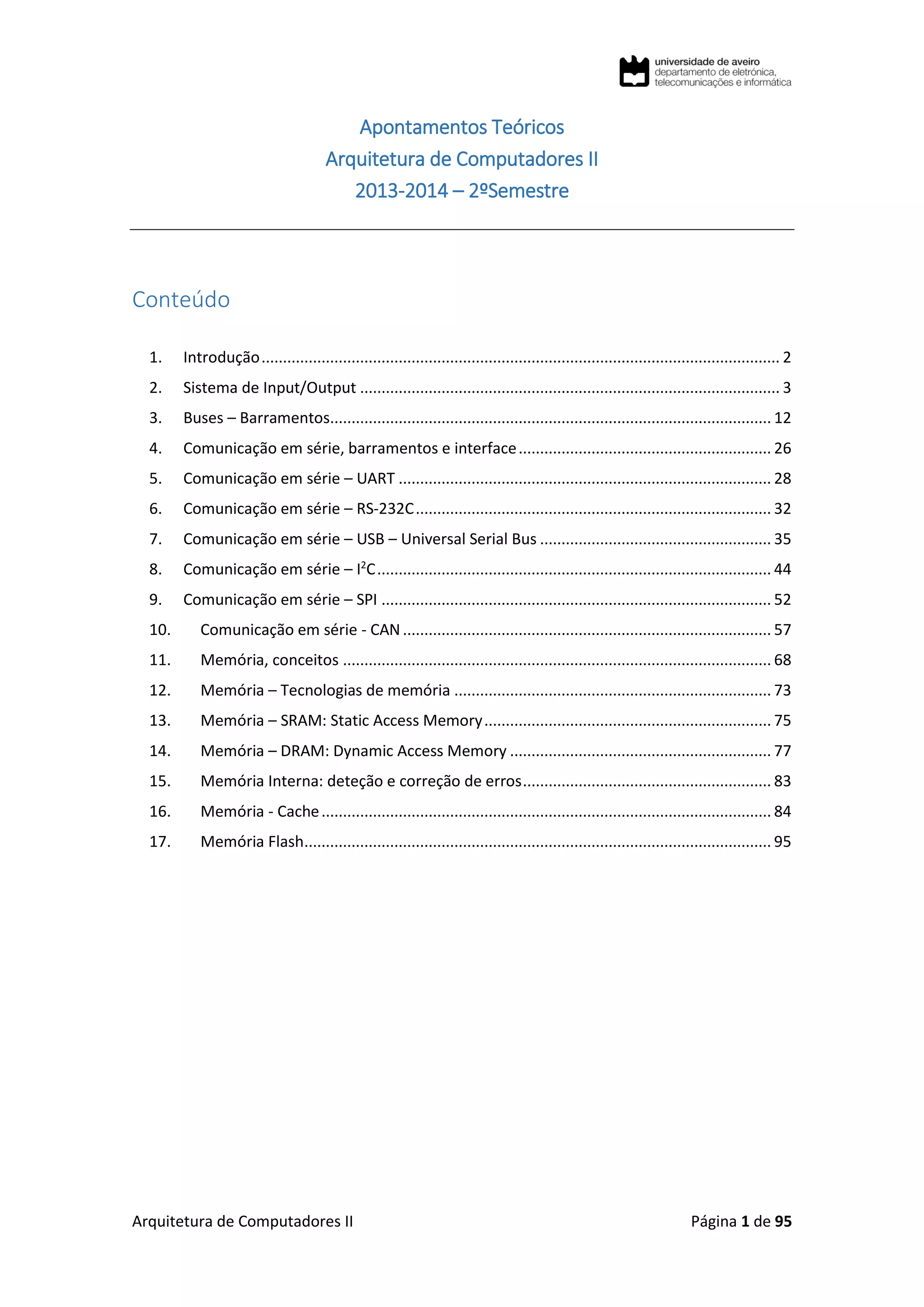
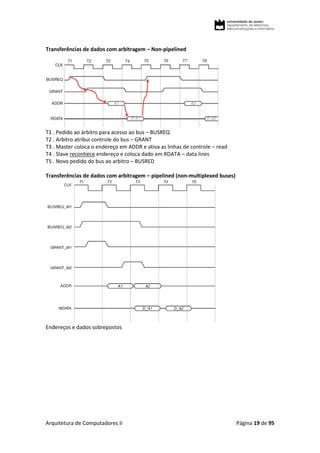
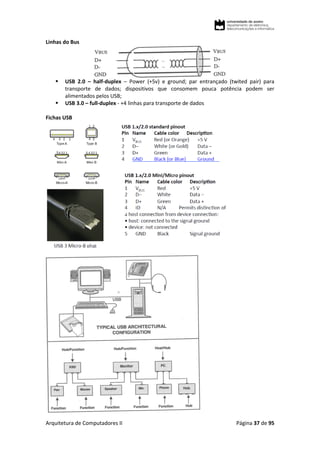
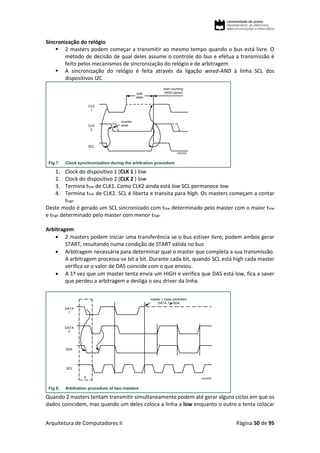
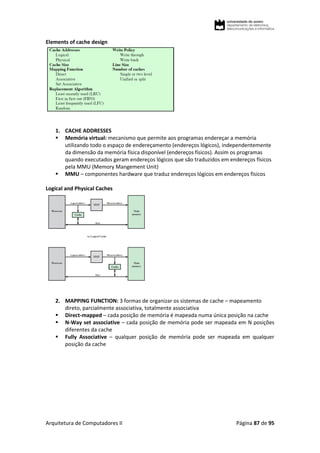
Fichas RS 232
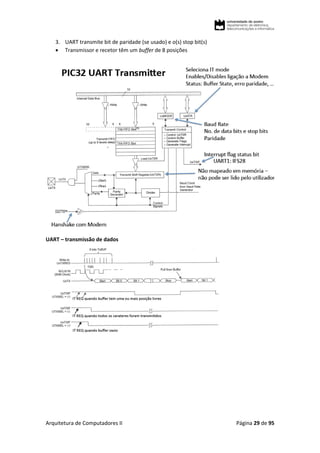
RS 232 – descrição dos sinais
Null modem
Ligação direta de 2 DTE, sem modems – necessárias apenas 3 linhas
Distância máxima entre os equipamentos: 20 metros
Níveis de tensão – camada física – codificação dos níveis lógicos
O standard define as tensões máximas e mínimas para 1 e 0 lógicos:
Nível 1: -3v a -25 v (valor típico -12v)
Nível 0: 3V a 25 v (valor típico +12v)
Valores da tensão entre -3v e +3v têm valor logico indeterminado
Na ausência de informação a tensão na linha é equivalente ao nível 1 (-12v)
Um valor da tensão de 0v no recetor é interpretada como um corte ou um curto-circuito
na linha
[-3v, 3v] – intervalo “proibido ”](https://image.slidesharecdn.com/apontamentodeac2-200412211614/85/Apontamentos-Arquitetura-de-Computadores-2-33-320.jpg)




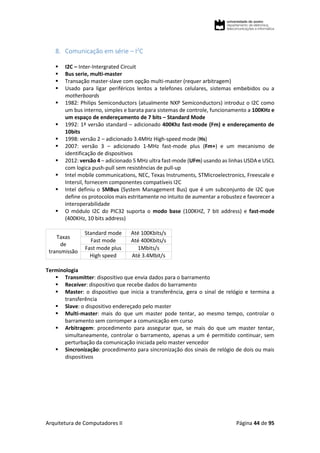




























![Arquitetura de Computadores II Página 88 de 95
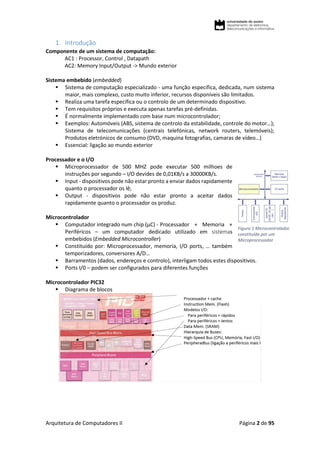
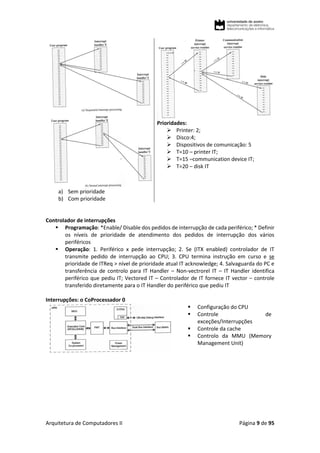
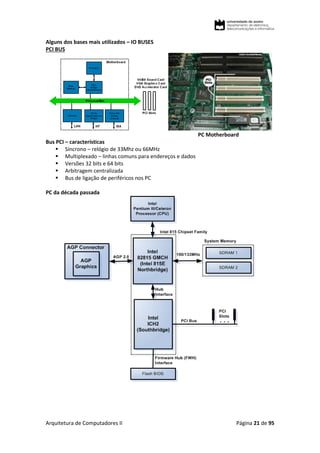
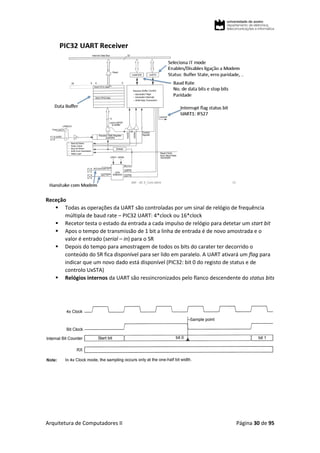
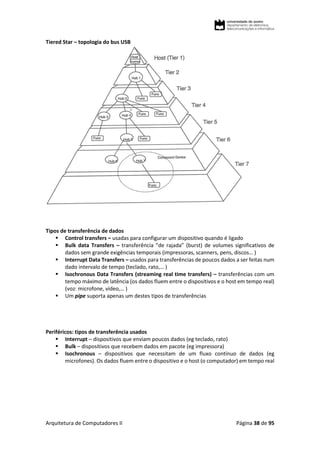
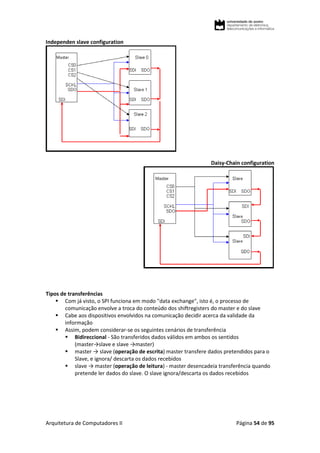
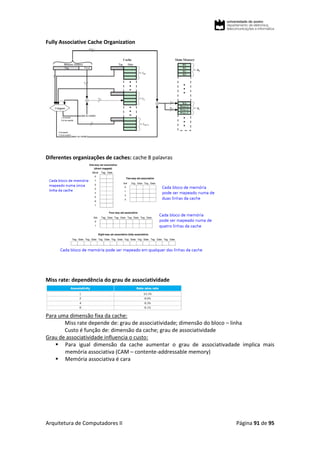
Direct – Mapped Cache
Cache 8 posições Memoria – 32 posições
Duas informações necessárias: qualquer o bloco mapeado em cada posição tag; se posição da
cache contem informação valida valid bit
O endereço do bloco é obtido, a partir do endereço real, por:
o Endereço do bloco = endereço real / dimensão do bloco ( Endereço do bloco =
[tag group], i.e. "tag" concatenado com "group" )
A posição da cache (i.e. a linha) associada a um dado endereço é dada por:
o Pos = endereço do bloco % número de blocos da cache (pos = group)
O tamanho do bloco e o número de blocos da cache são potências de 2
Endereçagem
Assume-se que a cada linha (bloco) da cache tem a dimensão de uma word (i.e. w=2 para uma
arquitetura de 32-bits em que a memoria é byte addressable)](https://image.slidesharecdn.com/apontamentodeac2-200412211614/85/Apontamentos-Arquitetura-de-Computadores-2-88-320.jpg)







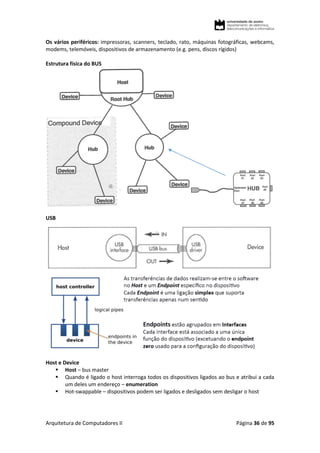
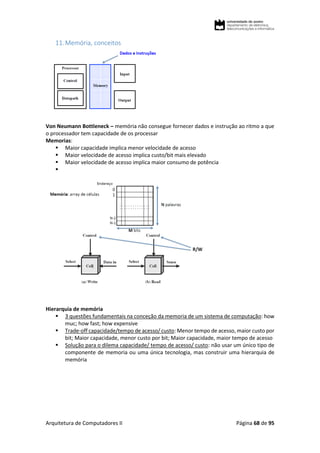
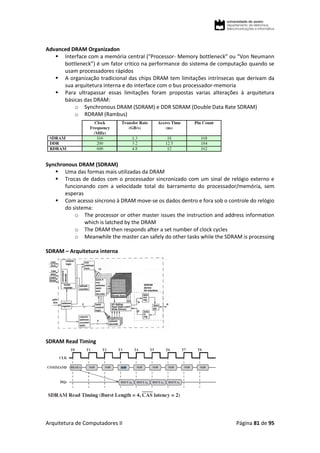
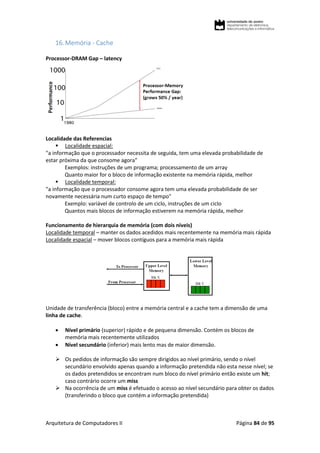
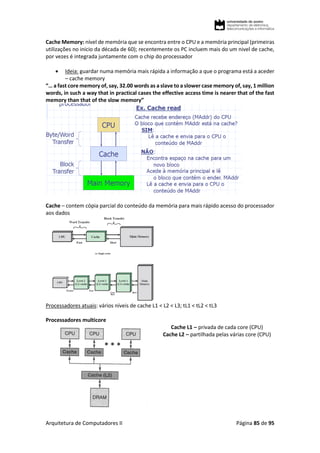
O documento discute arquitetura de computadores, focando-se em sistemas de entrada e saída (I/O), comunicação em série e memória. Aborda conceitos como módulos I/O, periféricos, transferência de dados, interrupções e técnicas de programação I/O. Também descreve tecnologias de memória como SRAM e DRAM.







































![Dispositivos [Entrada E SaíDa]](https://cdn.slidesharecdn.com/ss_thumbnails/dispositivos-entrada-e-sada-1208487451781708-8-thumbnail.jpg?width=640&height=640&fit=bounds)