Baixado 291 vezes






![Obrigado pela atenção Boa noite! [email_address] [email_address] (85)8746-5916](https://image.slidesharecdn.com/protocolocan-13245554341752-phpapp01-111222060501-phpapp01/85/Protocolo-Can-19-320.jpg)

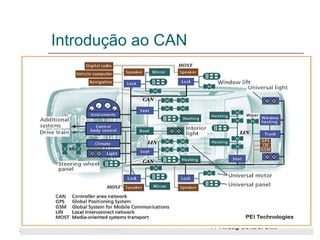
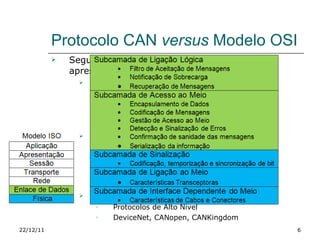
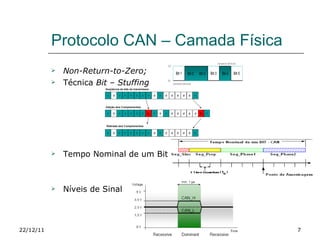
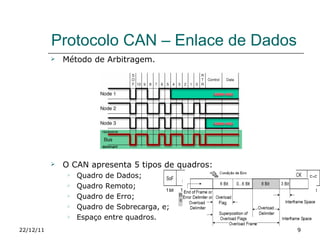
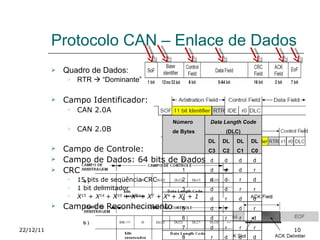
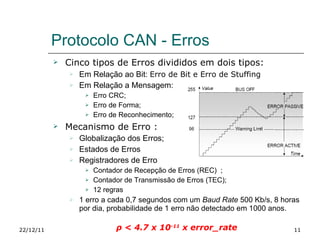
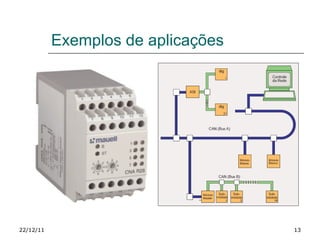
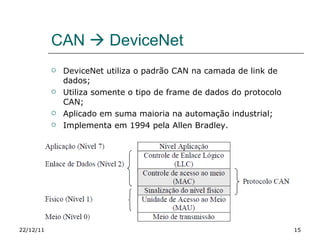
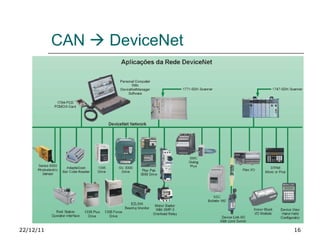
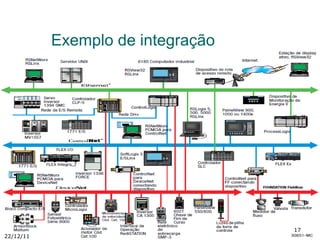
O documento apresenta um resumo sobre o protocolo de comunicação CAN (Controller Area Network). O CAN foi desenvolvido originalmente para aplicações automotivas e possui características como comunicação de dois fios, arbitragem não destrutiva e taxas de dados que variam de 10 kbit/s a 1 Mbit/s. O documento descreve as camadas física e de enlace do protocolo CAN e apresenta exemplos de aplicações como automação industrial e derivações do CAN.


















![Aula cardiopatia completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/aulacardiopatiacompleta1-101212211453-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)























































