Transferir como PDF, PPTX
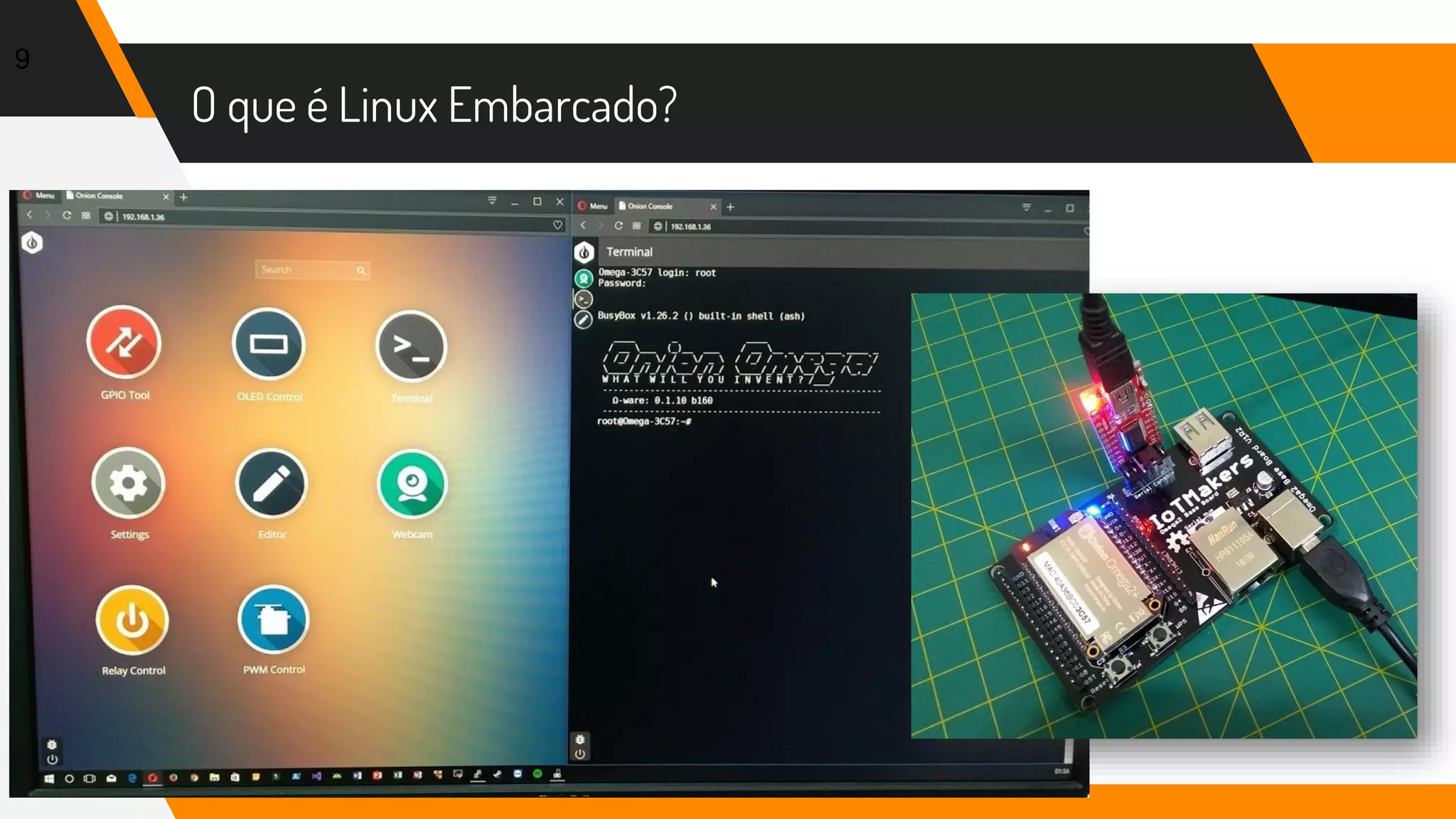
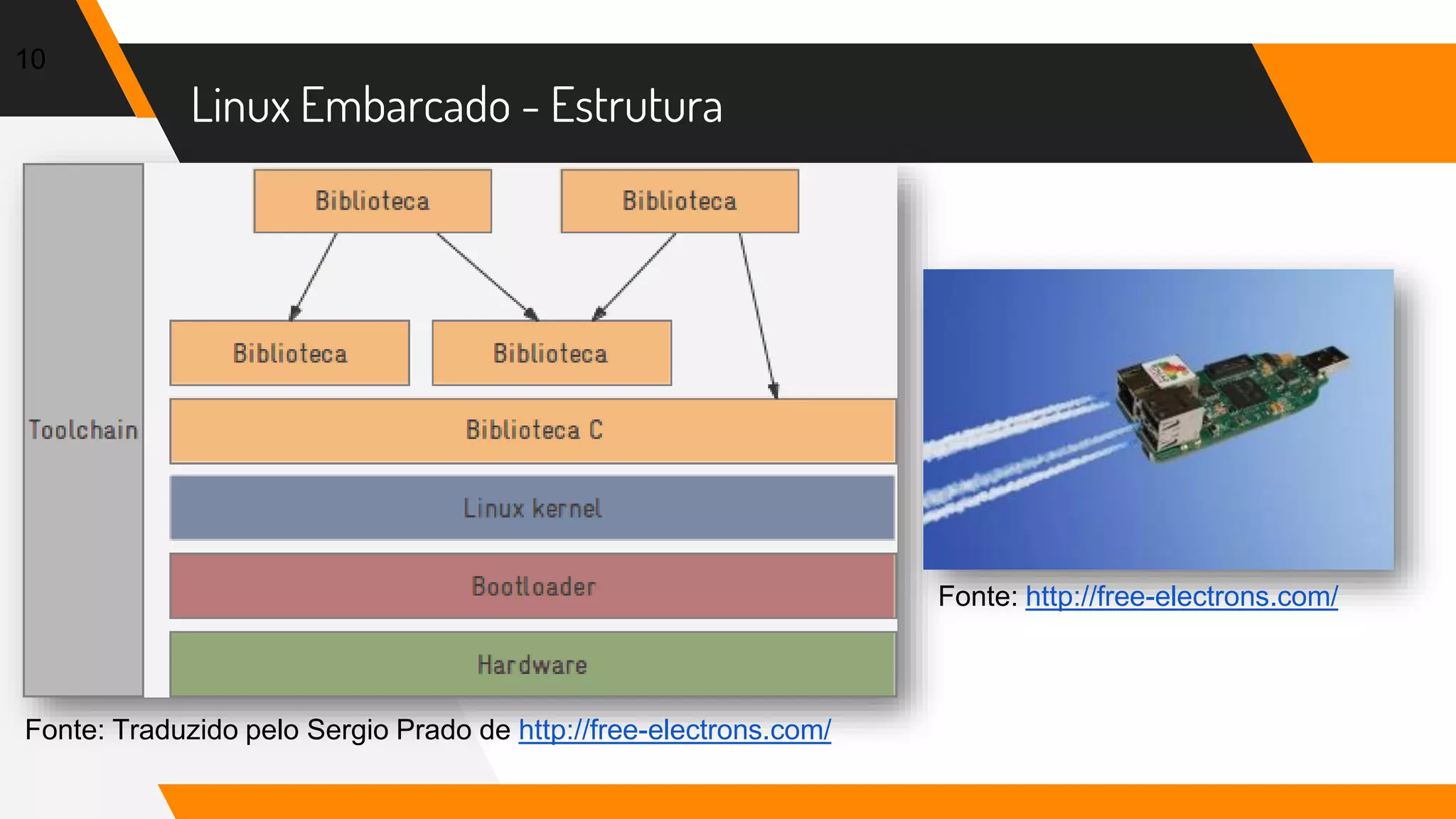
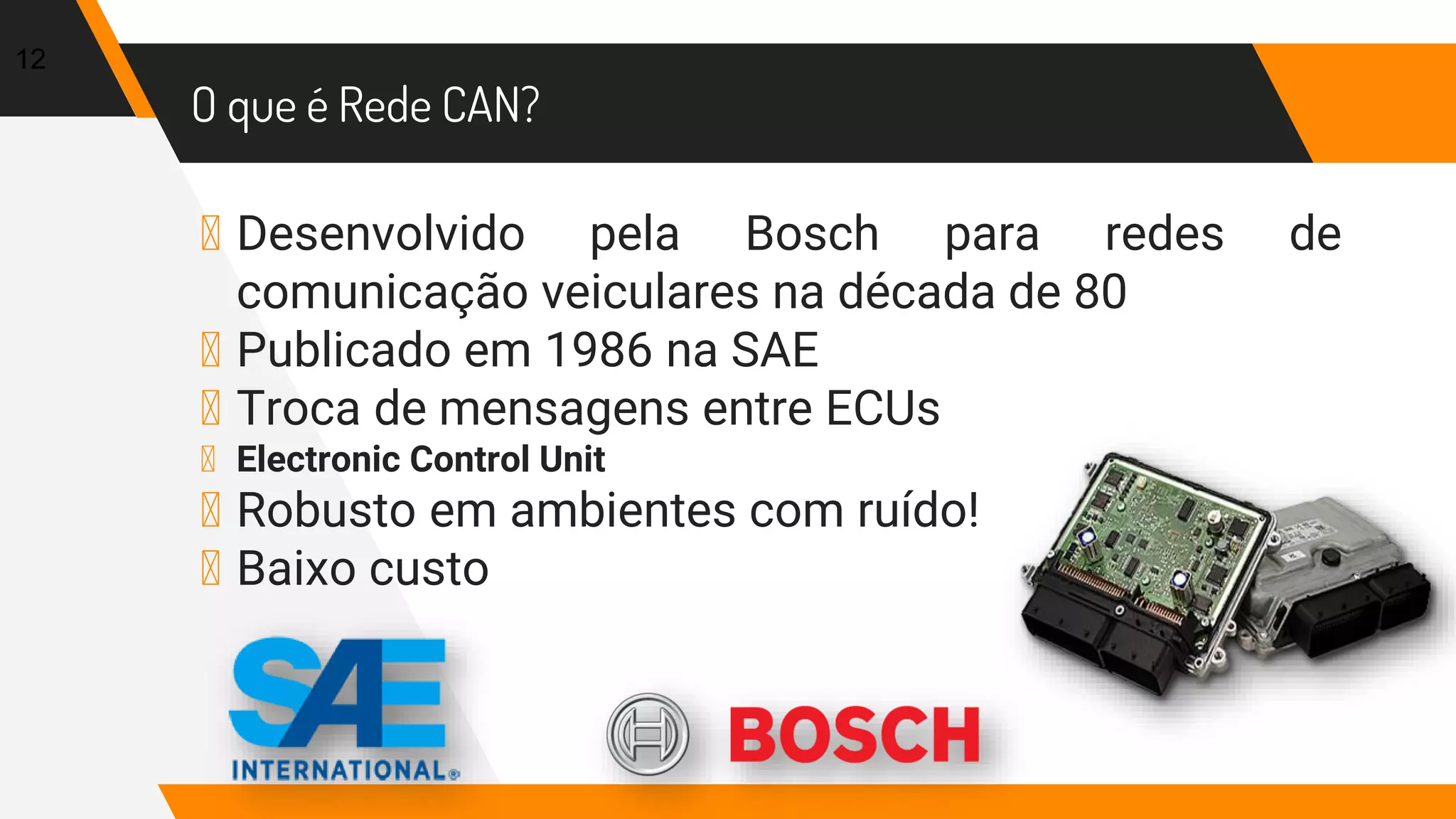

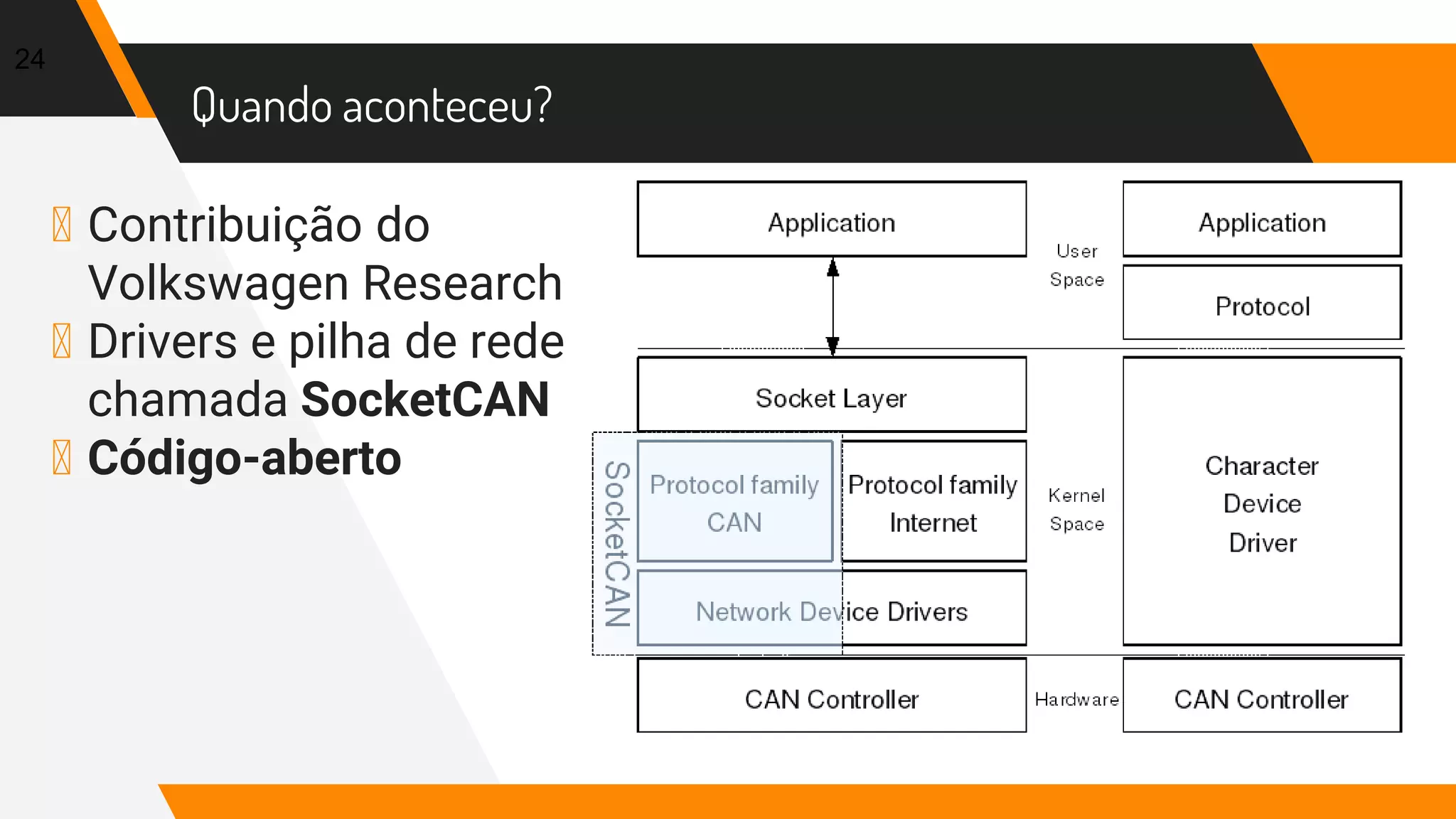
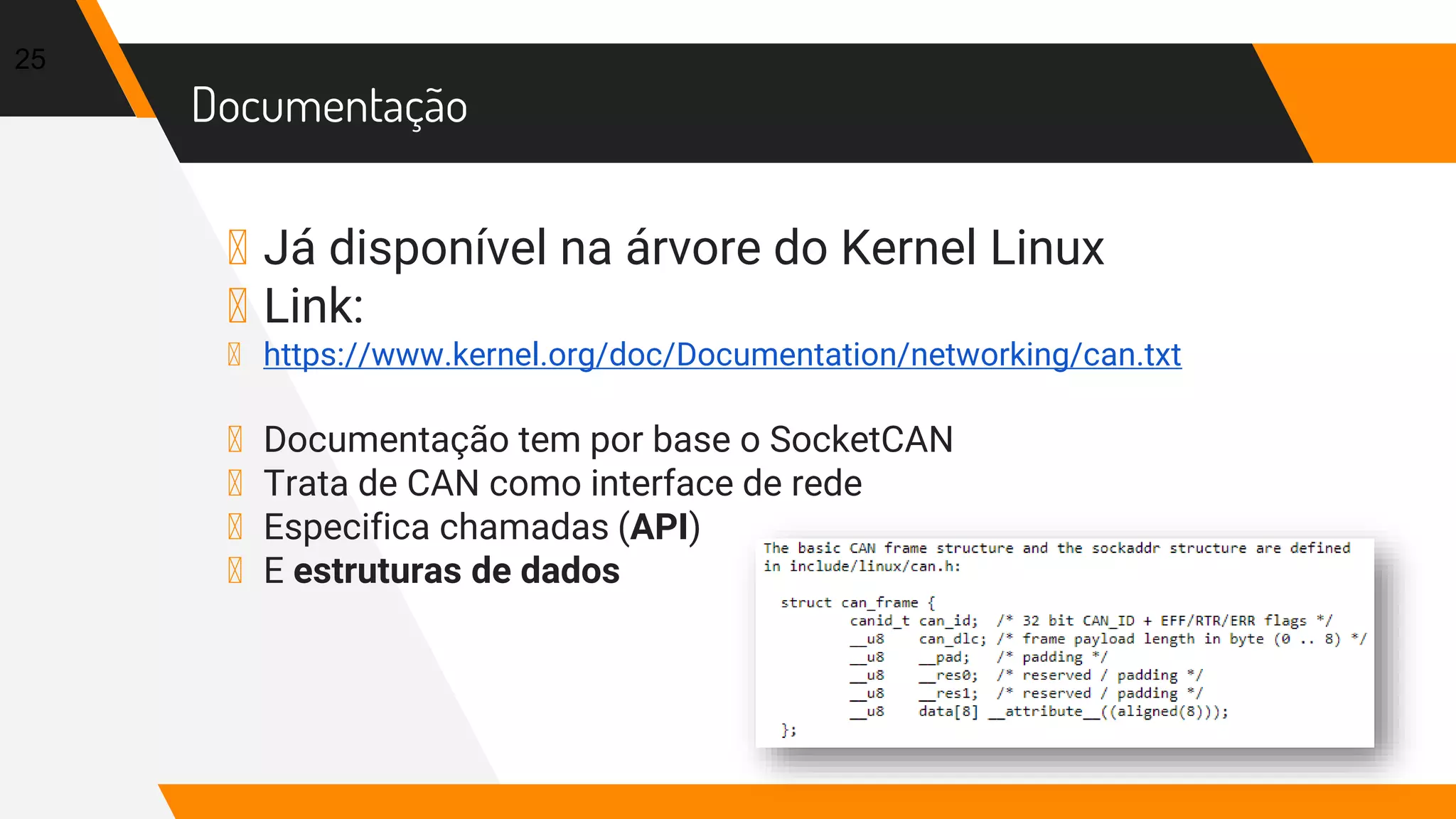
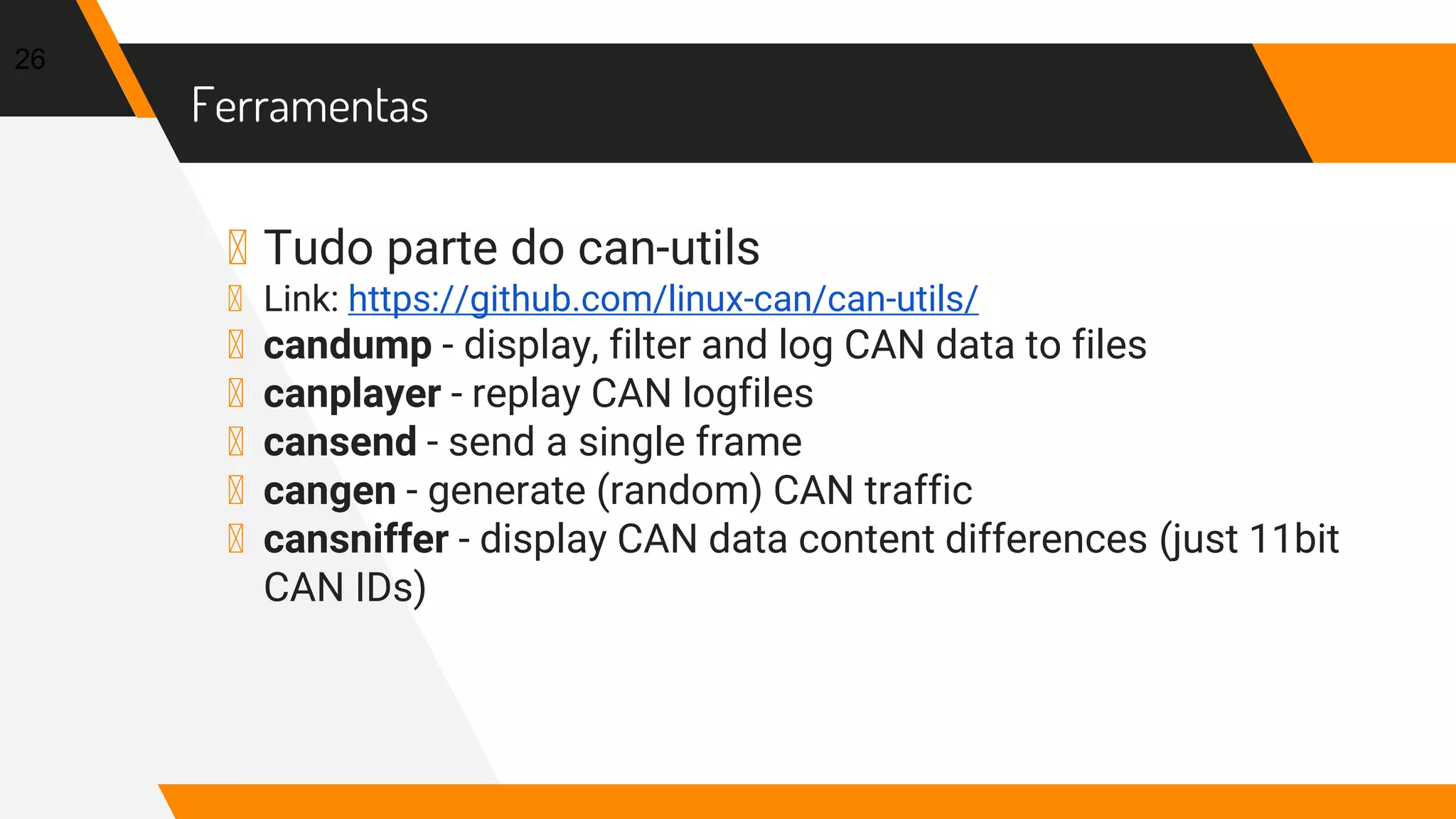
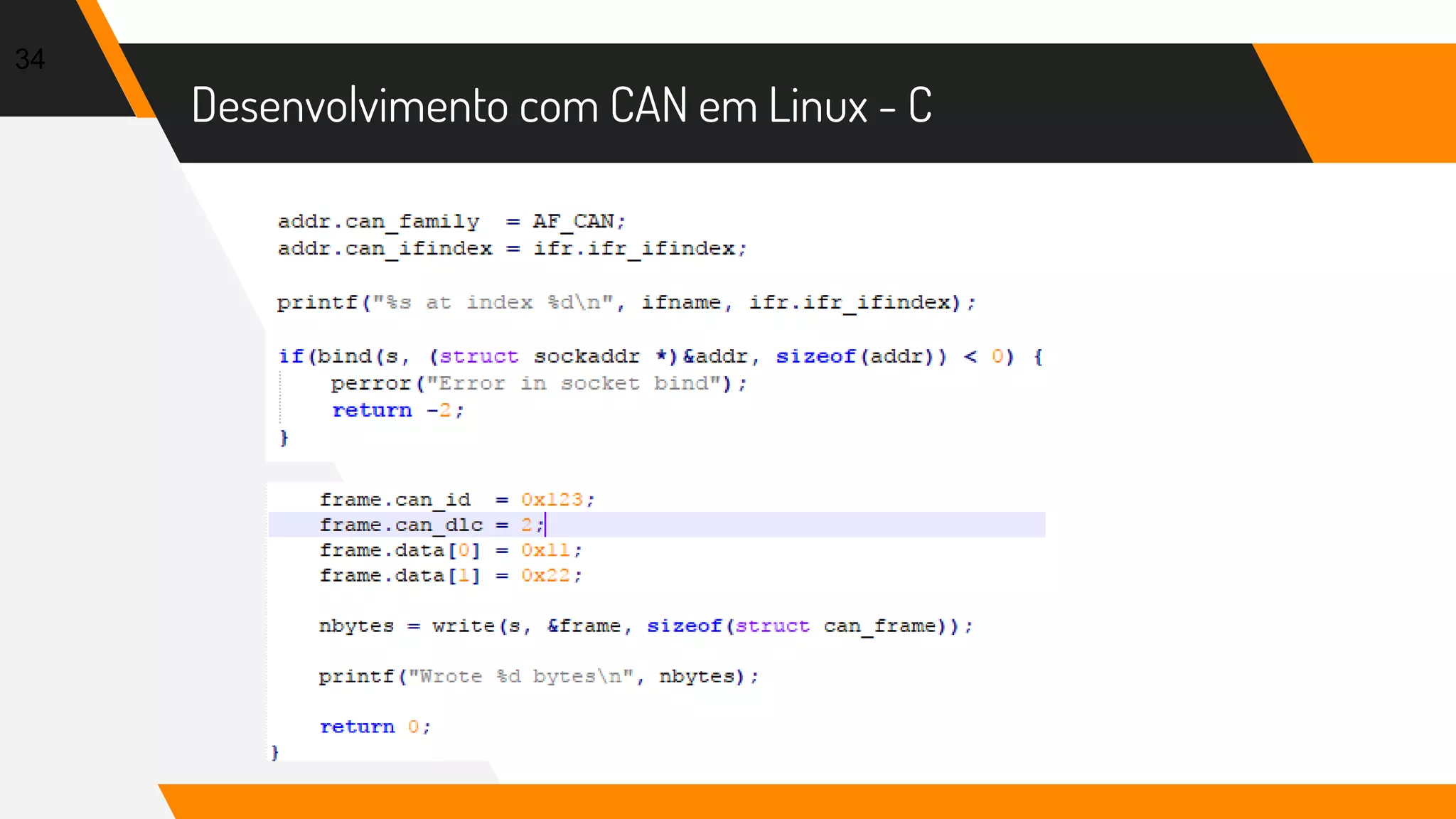
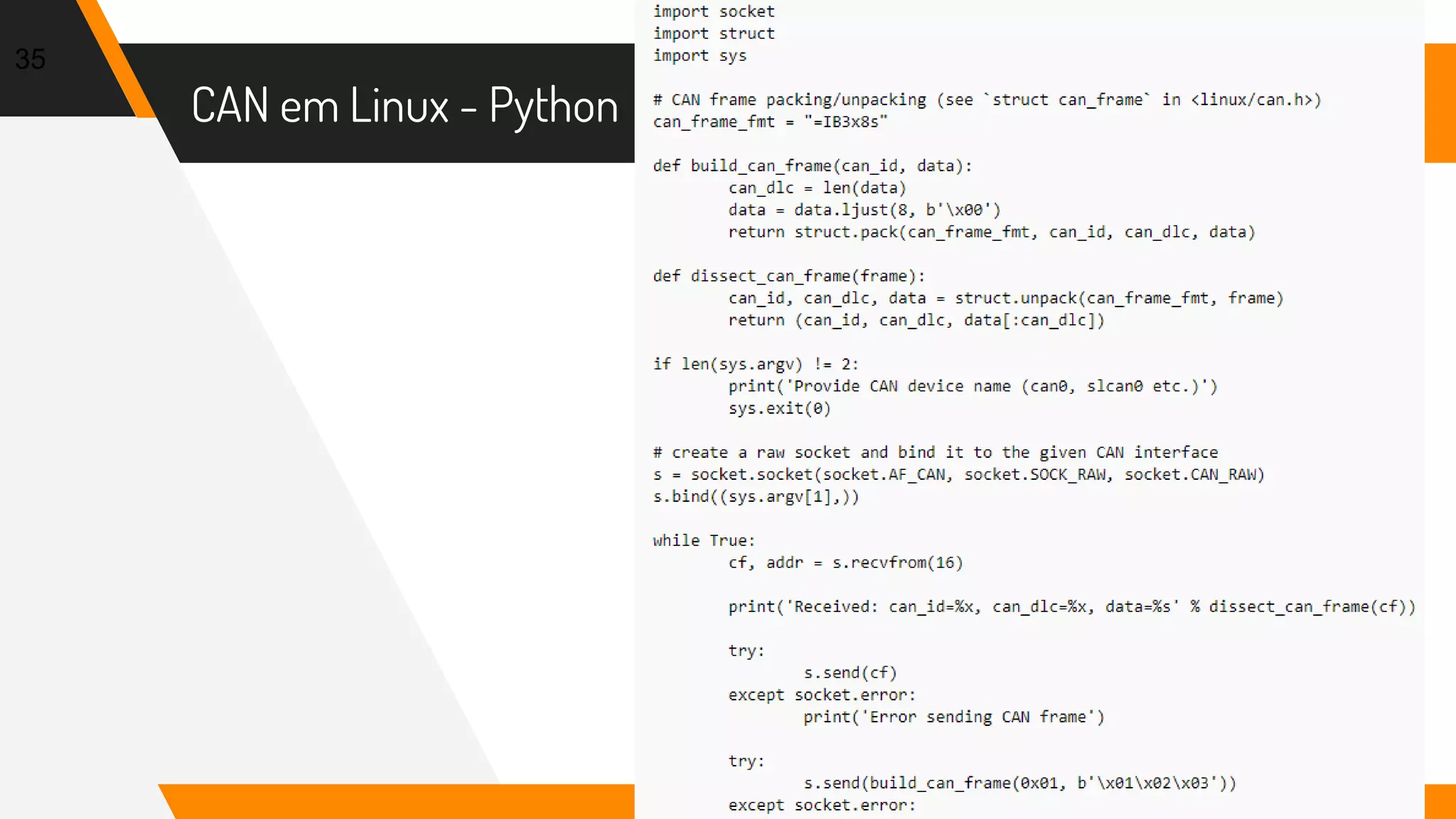
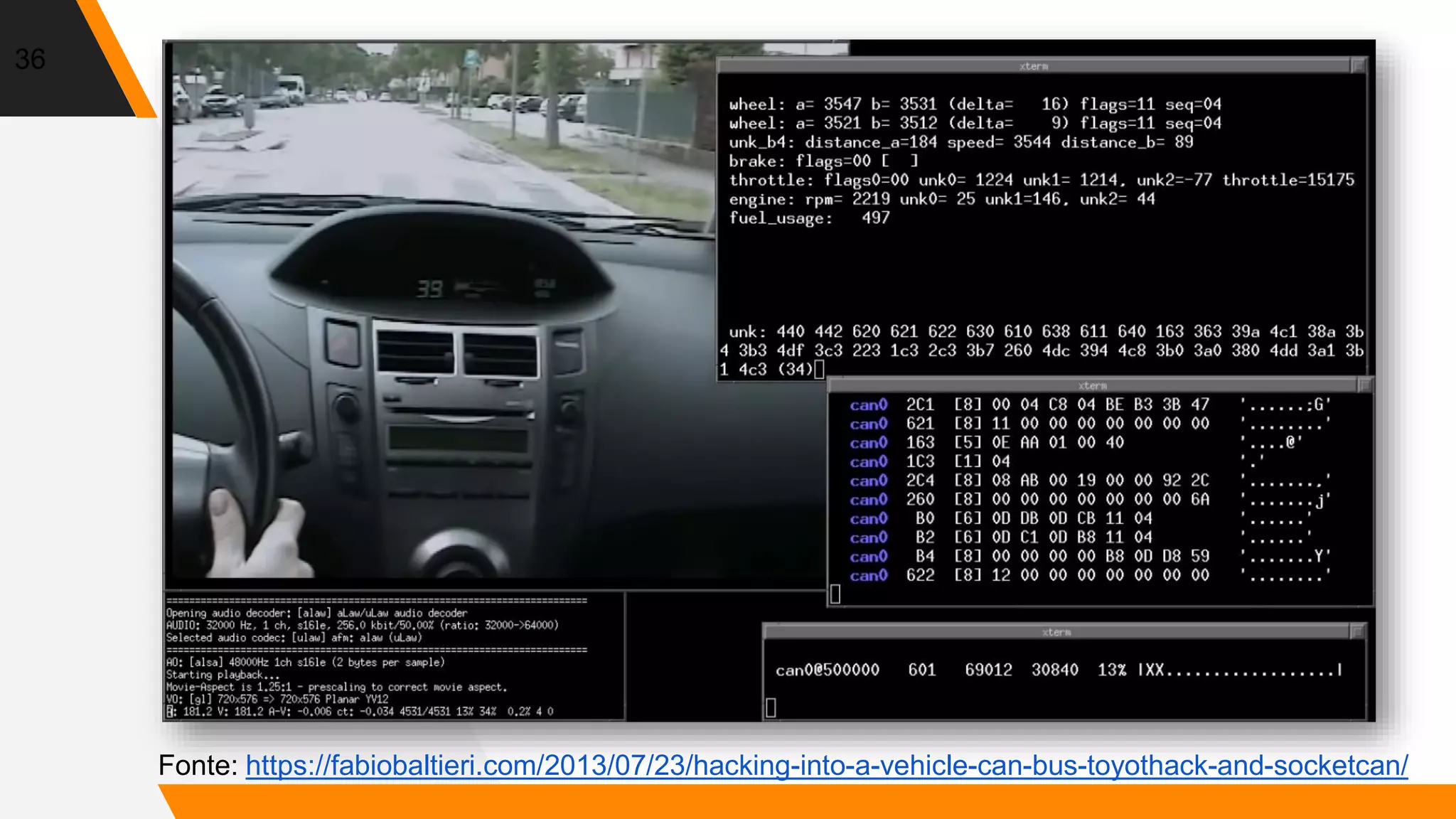


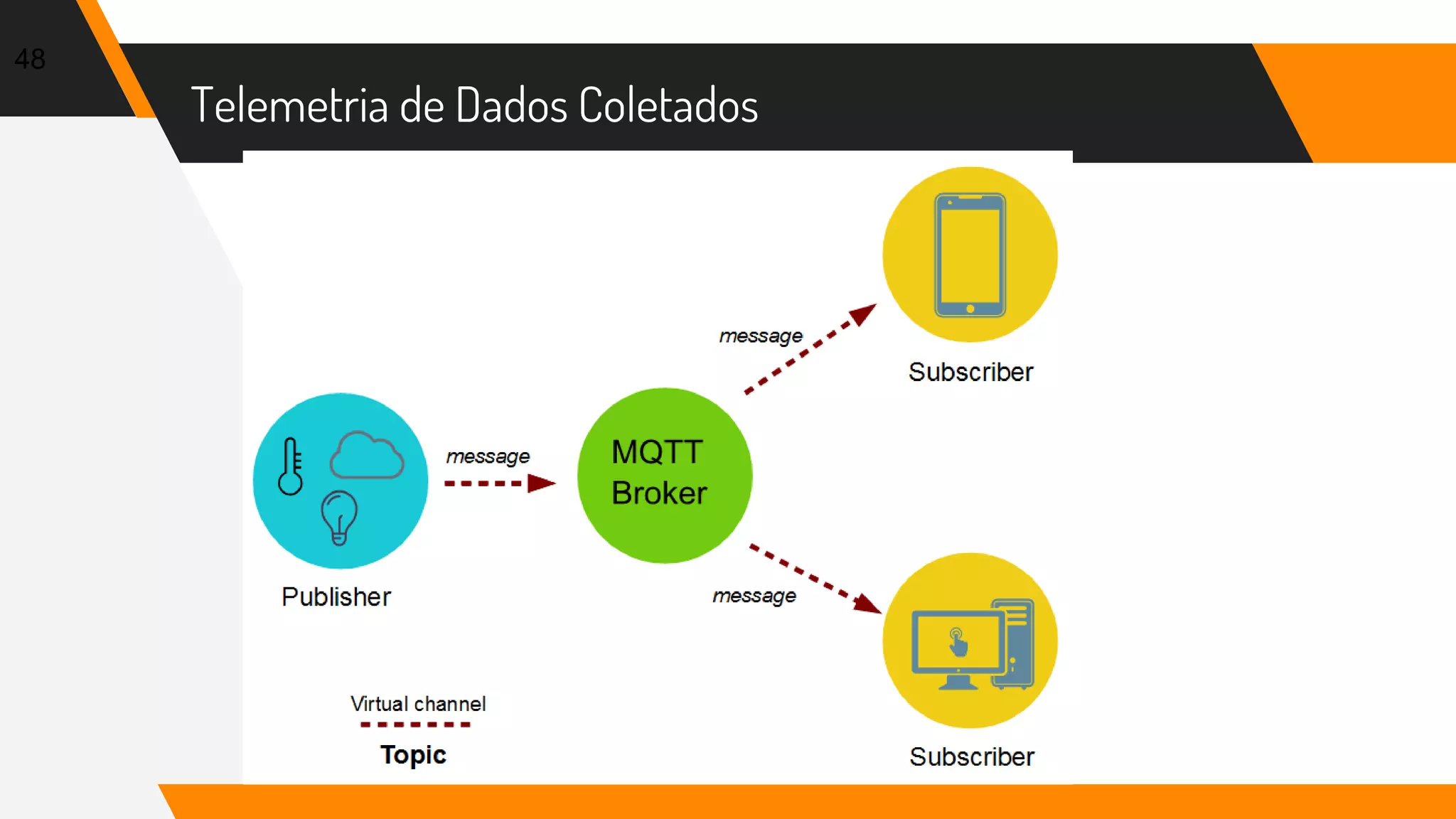



O documento aborda a integração do Linux embarcado com a rede CAN, destacando suas características, estrutura e aplicações em diferentes setores, como automotivo e robótica. Apresenta a SocketCAN como uma API fundamental para o desenvolvimento, além de ferramentas úteis para manipulação de dados CAN. O autor, Prof. André Márcio de Lima Curvello, também compartilha referências e recursos para aprofundamento no tema.














































































