Baixado 12 vezes



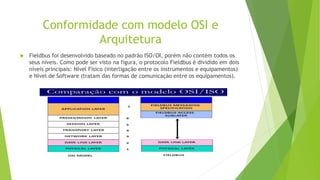

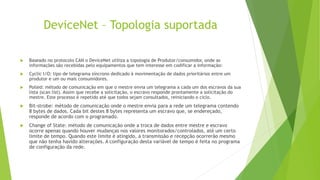
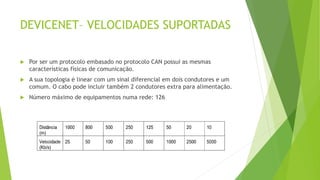



O documento discute os protocolos Fieldbus, DeviceNet e Profibus, descrevendo seu histórico, topologias suportadas e velocidades. Fieldbus surgiu na década de 40 e foi padronizado na década de 90. DeviceNet e Profibus usam CAN e foram desenvolvidos para automação industrial. Ambos suportam topologias de produtor/consumidor e anel/barramento. As velocidades variam de kbps a Mbps dependendo do meio físico.













































